@bnsgeyer @Leonardthall
Today, I flew version 4.3.6 on the helicopter.
The first flight took off in steady mode and then flew. The whole performance was perfect.This is the flight log.The helicopter is flying normally in stabilize mode
However, the second time I tried to take off in loiter mode, while the helicopter was still on the ground, the pilot did not push the height stick, the helicopter suddenly jumped from the ground about 2.5 meters above the ground, and then fell heavily.This is the flight log.https://we.tl/t-Cm5MHiZBra
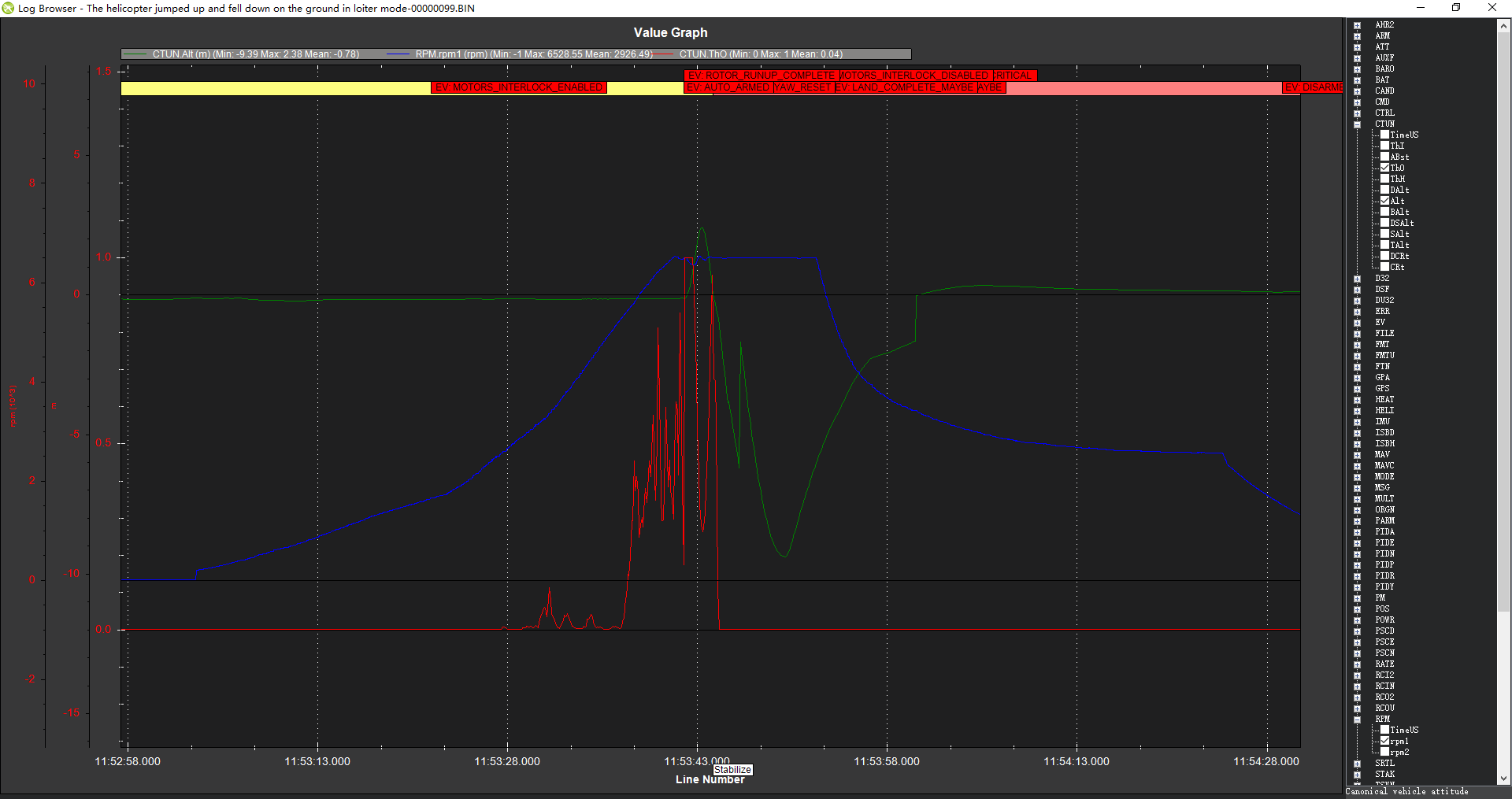
Although the vibration of the helicopter is larger than that of the multi-rotor wing, from the first flight, the vibration will not affect the normal flight at all.I wonder if there is something wrong with my parameter setting?At least in my opinion, when the helicopter is still on the ground and the height stick of the remote control is still at its lowest position, the helicopter should not take off from the ground and the total distance should not be involved in altitude control.
As can be seen from the flight log, when the helicopter does not decide “not landed”, the integral term of altitude control fluctuates dramatically and participates in altitude control substantially, resulting in the helicopter’s collective pitch reaching a very large value, even the maximum, when the fixed speed is not completed, thus making the helicopter jump up.
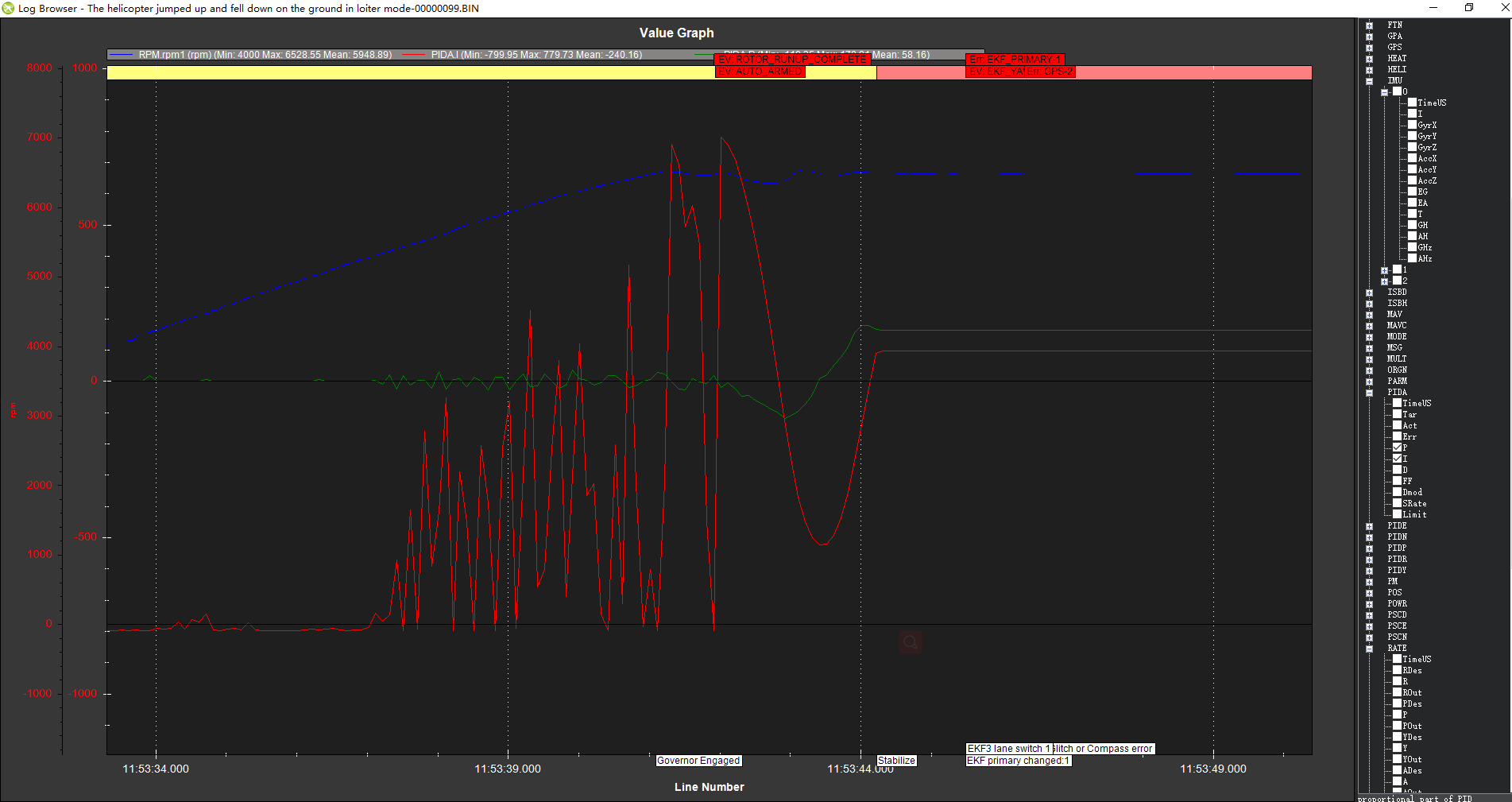
At present, the acceleration term is introduced into the judgment condition of whether the helicopter is on the ground, but in fact, the acceleration seems to be easily affected by vibration.In many cases, such as transient resonance, uneven ground will cause the vibration to increase.Whether the acceleration term in this algorithm can be removed.Finally, when the helicopter is on the ground, the integral term of altitude control and attitude control is 0.