My firmware version is 4.1.5. Today our unmanned helicopter crashed while hovering steadily for about 2 hours. Just before the crash, the flight control data went dead. Flight controllers did not record the duration of the crash. I suspect that for some reason the flight control is buggy or stupid. After checking, I concluded that the power supply to the flight control was normal, because after the helicopter crashed, the operator could shut down the engine by remote control.
Now, I am very confused about the cause of uav crash, I don’t know whether it is because of upgraded firmware 4.1.5 or other reasons, the following are my flight parameters, I hope to get your help!
Two power sources? You mean two batteries in parallel? Yes, the power is in the operating voltage range. After checking, I concluded that the power supply to the flight control was normal, because after the helicopter crashed, the operator could shut down the engine by remote control.
Was there more than one log file on the controller for that flight? The reason I ask is if there was a reset of the controller board a watchdog would have posted. After the reboot, the controller would’ve started a new log file and the information about the watchdog reset would be posted in that new file.
No, I mean providing 5v to the flight controller from at least two different 5v regulators.
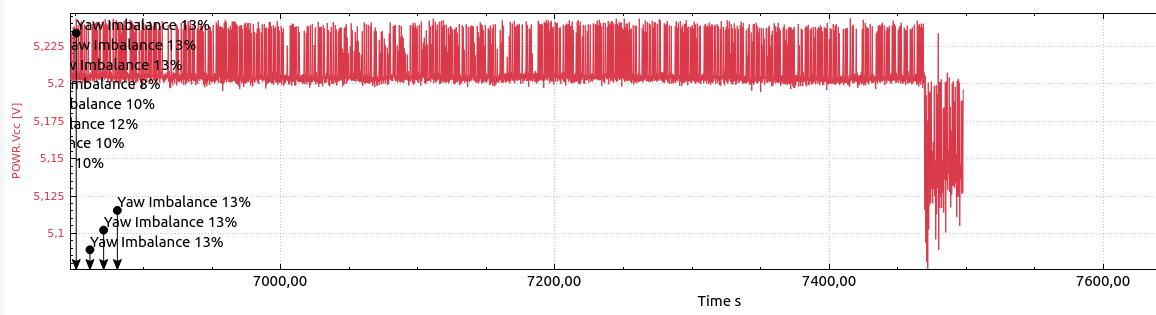
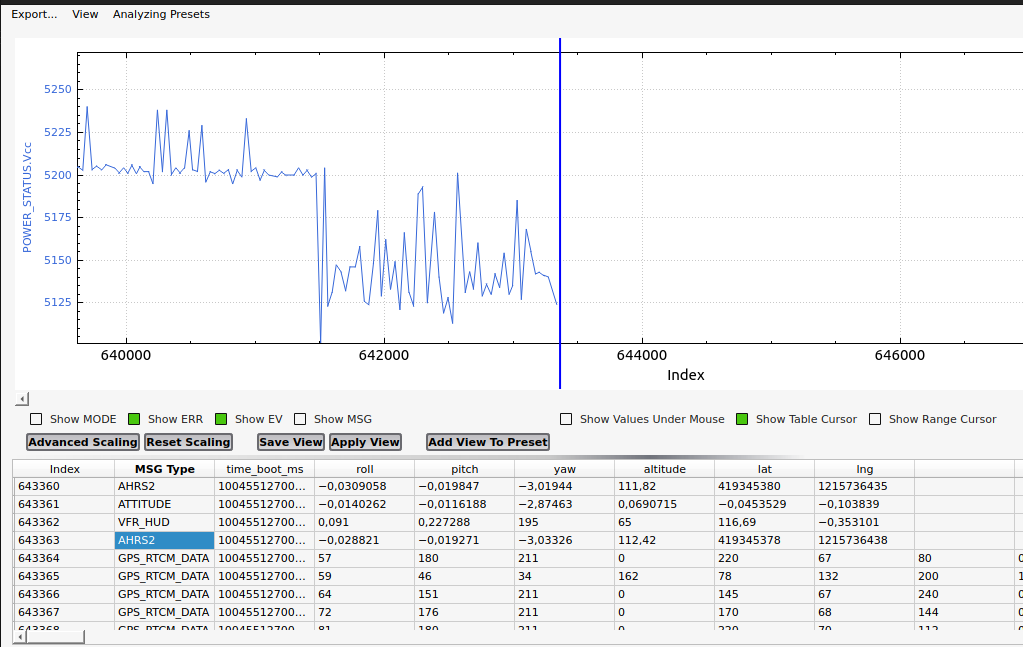
…And the log is showing a strong reason to suspect 5v power failure because the voltage drops and becomes it’s noise increases right before the log ends.
Yes, and your observations are also my suspicion. But there’s one question I haven’t figured out. Our engine is controlled by the flight controller, and the operator indirectly controls the engine by sending control signals to the flight controller through the receiver. When the helicopter crashed, the engine kept running, but the operator turned it off by remote control. If there is no electricity in the flight controller, the operator cannot control the engine. We have now also measured the power supply voltage of the flight controller, which is a normal value of 5.2V.
When the DC-DC converter overheats it may lower the voltage, and after cooling down works fine again.
Using an expensive CUAV X7 pro without a dual redundant, properly cooled 5V power supply seams illogical to me. We run our with redundant power supplies, and it runs 24/7 for several weeks now!
your tlog and log ends at the same time - (telemetry would not have stopped if onboard logging failed for some reason) -the HEARTBEAT and RTCM packets you see are from the GCS)
I can’t explain how the RC pilot was able to shut down the engine, but there are two simple explanations that I can guess on:
1: the IO co-processor was kind of alive (in a failsafe mode?) and forwarded some RC controls
Many RC recievers works as low as 2.5v (Graupner - for example, is 3.3…8.4v ) - but works fine down to 2.5v
I can guess that the io-processor has pretty low requirements.
When configured as a plane, it’s normal that the IO processor fails back to direct RC control.
I am not sure about the copter. - nor about the internals of an CUAV X7
The main processor (STM32H743), for example, works between 1.62 and 3.6v - it could be programmed that if it measures less than usable operational voltage (5.1v) - then it falls back to just forward some manual control. - like arduplane
Have in mind that even if the processor can go down to 1.65v, it may not be able to run at full speed, and most of it’s attached sensors will be dead, so it can’t “just work”
@amilcarlucas@Andre-K Thank you very much for your advice, which inspired me a lot. Anyway, the dual power supply you mentioned is really necessary and makes sense. Thank you very much for taking the time to help me. Your analysis is very professional and clear. Good luck!