I was trying to take off my drone using my Flysky FS-I6 in stabilize mode, but every time I tried to take it off, the drone tilted toward Motor 6 in a southwest direction. My motor, ESC, and propeller parts are in the picture. My flight controller is Holybro Pixhawk 6C with an M8N GPS module.
Hello @Yousef1 thank you for the nice detailed pictures.
I assume you have read the documentation and did a proper tune. Next time post the configuration steps you did and the firmware version you used together with the pictures.
Please post a .bin log file. so that we can help you.
Thanks @amilcarlucas being there for help. Please find the attached .bin file in this response.
before mounting the Pixhawk FC I did:
I did accelerometer calibration for the Pixahwk
After I mounted the Pixhawk FC:
I did level calibration (below accelerometer calibration), ESC calibration, compass calibration, and Radio Calibration.
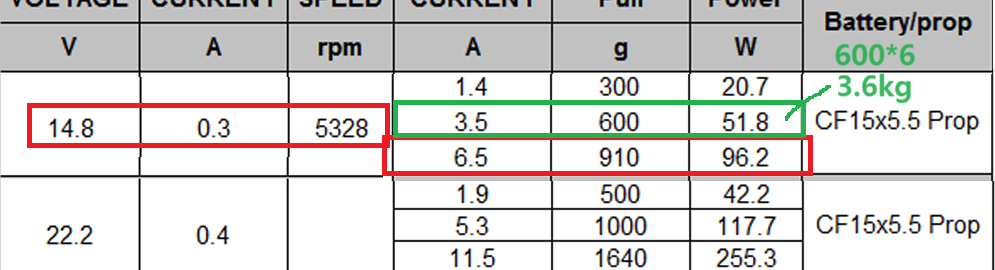
The drone also looks under powered. At those high values the drone should be leaping off the ground. It looks to me like you’re using 4S but that might not be enough.
Once the copter does get airborne the GPS cable and battery cable waving around in the breeze will be a problem.
Secure them to the frame and make sure the wiring is not pulling on the flight controller or rubbing against it.
if your takeoff weight is 3-4 kg, your Hexa configuration is good to fly.
have you finish ESC calibration?
And is the wire soldering capable of handling enough current?
Is the 3d printed frame stiff enough?
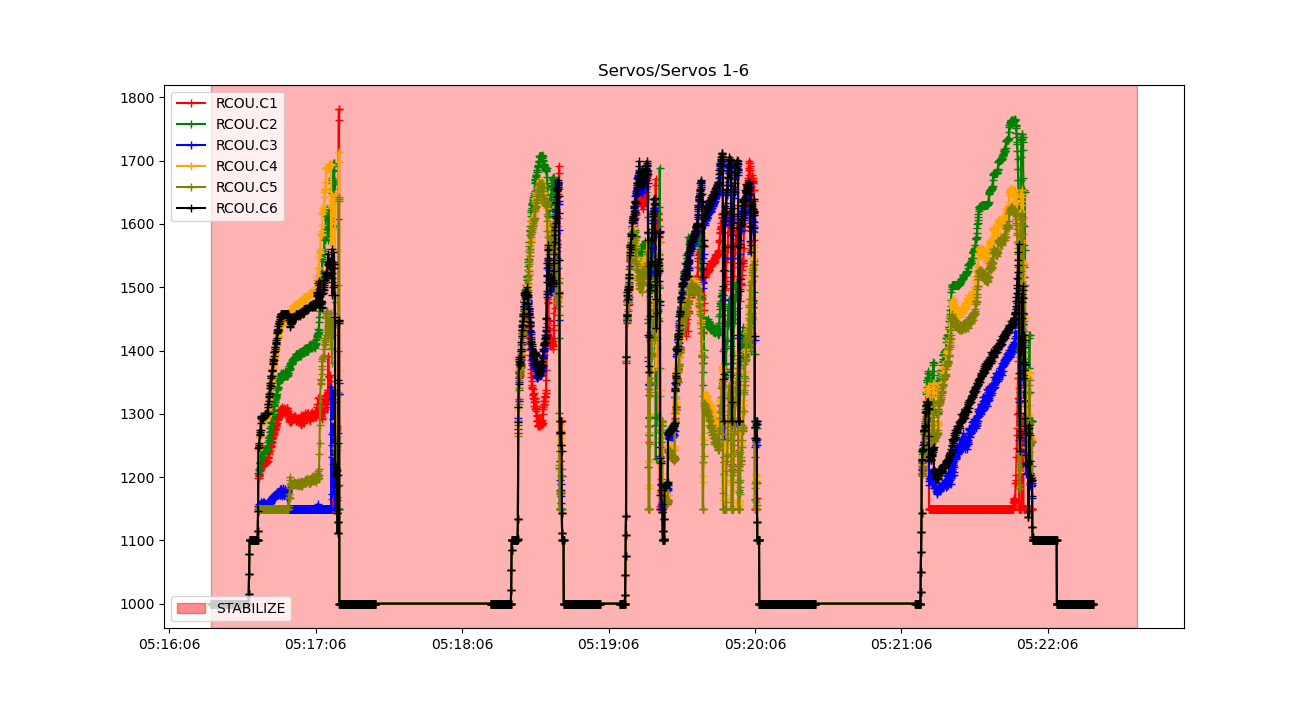
In your logs, it looks like the vibration getting worse as the motor power increases, and this happens even when the frame is not stiff enough.
And the pixhawk should stay attached as well.
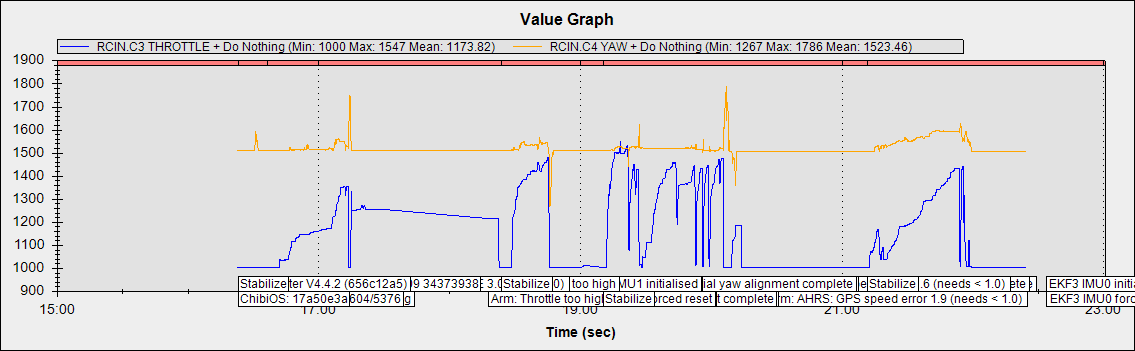
If you are using mode 2 and are a beginner, the rudder can be input at the same time as the throttle key.
Also, for ardupilot, if the radio is in mode 2, you need to ARM at 5 o’clock, and quickly move to 6 o’clock, and then take off by moving the stick to up while maintaining heading.
it is not easy for a beginner.
Hey @Yousef1
I think you have to check the wire soldering of all the motors, ESCs, and also the junction that connects with the main battery…
some time ago I was troubling with the same issue, but I noticed that the soldering was not smooth(current buffering) no worry after repeating he behaved normally
I made sure that they are well soldered into the power distribution board (PDB) but they are not ordered in the PDB which I am not sure about but maybe made an effect. I made sure that the motors were ordered and numbered correctly and rotated in the right direction during motor testing.
How can I reduce the vibrations over my Pixhawk 6C? Also regarding the arming and takeoff, yeah I am using mode 2 and I arm using a switch. Then, I take off by lifting up the throttle (lift stick) slowly but Again the drone gets tilted.
It’s overweight/underpowered even at 3kg on 4S battery power and that configuration. One would expect ~65% hover throttle and it should be 50% or less. At 4kg it’s much worse of course. 6S power is what’s needed at that weight.
And why are you trying to take-off anyway before setting the Initial Tune Parameters?
This might be the case, but I measured accurately the all-up weight of my drone and it will never exceed 2.9 kg (including the wires and everything). Regarding the initial tune parameters yeah I did not do it but I did it later. It is my first DIY drone and my first flight and there are many things still not sure about it.
Anyway, I did click the calibrate level button ( in the middle from accelerometer calibration) before flying up my drone and it was able to take off and it was working well but I guess it needs some tuning for the Roll/Pitch since it is not stable yet.
It’s overweight/underpowered. You mentioned adding a 2S battery in series with the 4S battery for 6S power. OK as long as they are the same capacity and they should be the same C rating.