Hello,
I am currently using Mission Planner version 1.3.82 and QuadCopter firmware V4.5.7. I have calibrated the accelerometer, compass, and radio.
The problem is that after takeoff, the drone rotates to the left along the yaw axis.
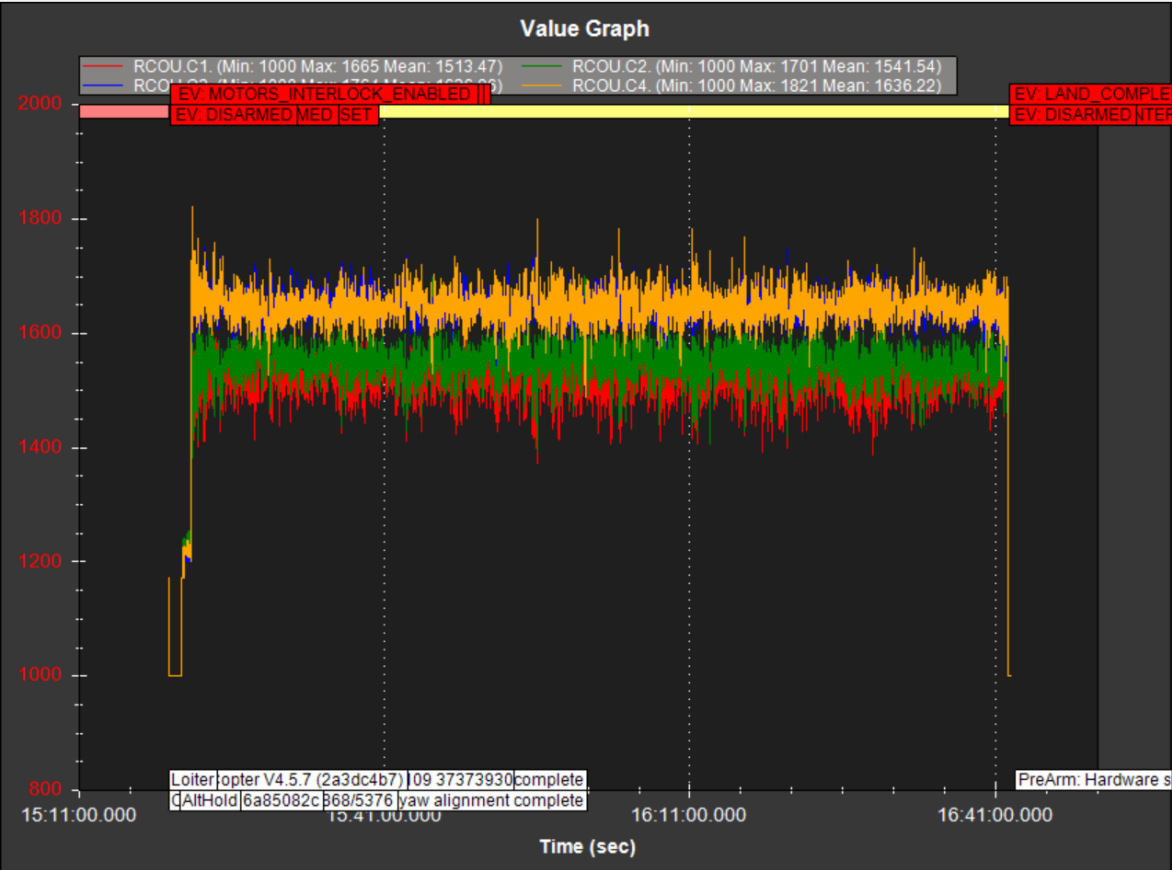
After checking the logs, I noticed that the outputs of motors 3 and 4 are higher than those of motors 1 and 2.
Someone would know tell me why this happens?
The log file is too large to upload.