i use the matek h743 with a 450 frame and 12 inch propeller.
When I reload the firmware and configure everything, the drone works at first. I get it in the air in stabilized mode. then I switch it to altitude hold mode, after a few minutes and balancing in roll and pitch, the drone becomes very unstable and I have to land it. after this happens, the drone is unflyable and no longer stable. I thank you in advance for any help
Right, because you have to do some minimum tuning for Stable flight.
Drop the Rate Pitch/Roll P&I values to 0.100 (from default 0.135)
Set these based on MOT_THST_HOVER:
PSC_ACCZ_I,0.4
PSC_ACCZ_P,0.2
Set these to collect data for the notch filter which you need to configure:
INS_LOG_BAT_MASK,1 (you don’t need 7)
INS_LOG_BAT_OPT,4
And this:
INS_ACCEL_FILTER,10
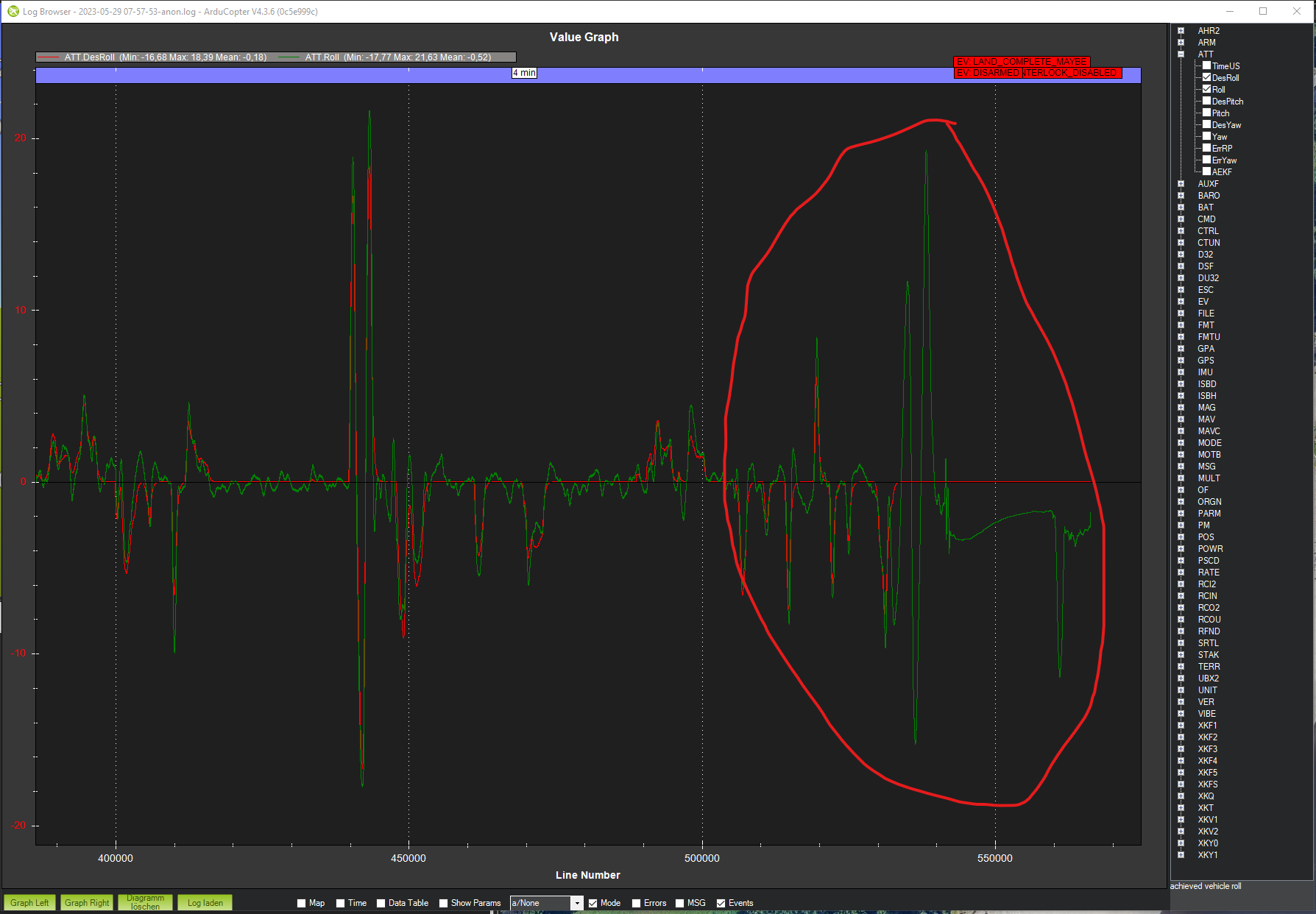
It’s a bad tune and you have a lot of compass interference which is not helping. If you enable PID logging we might be able to tell more. Please post .bin files. Do a compass MOT calibration.
I have tried but it still does not work as I would like. Since I am new I do not want to exclude a stupid error on my part. I have times the bin file attached
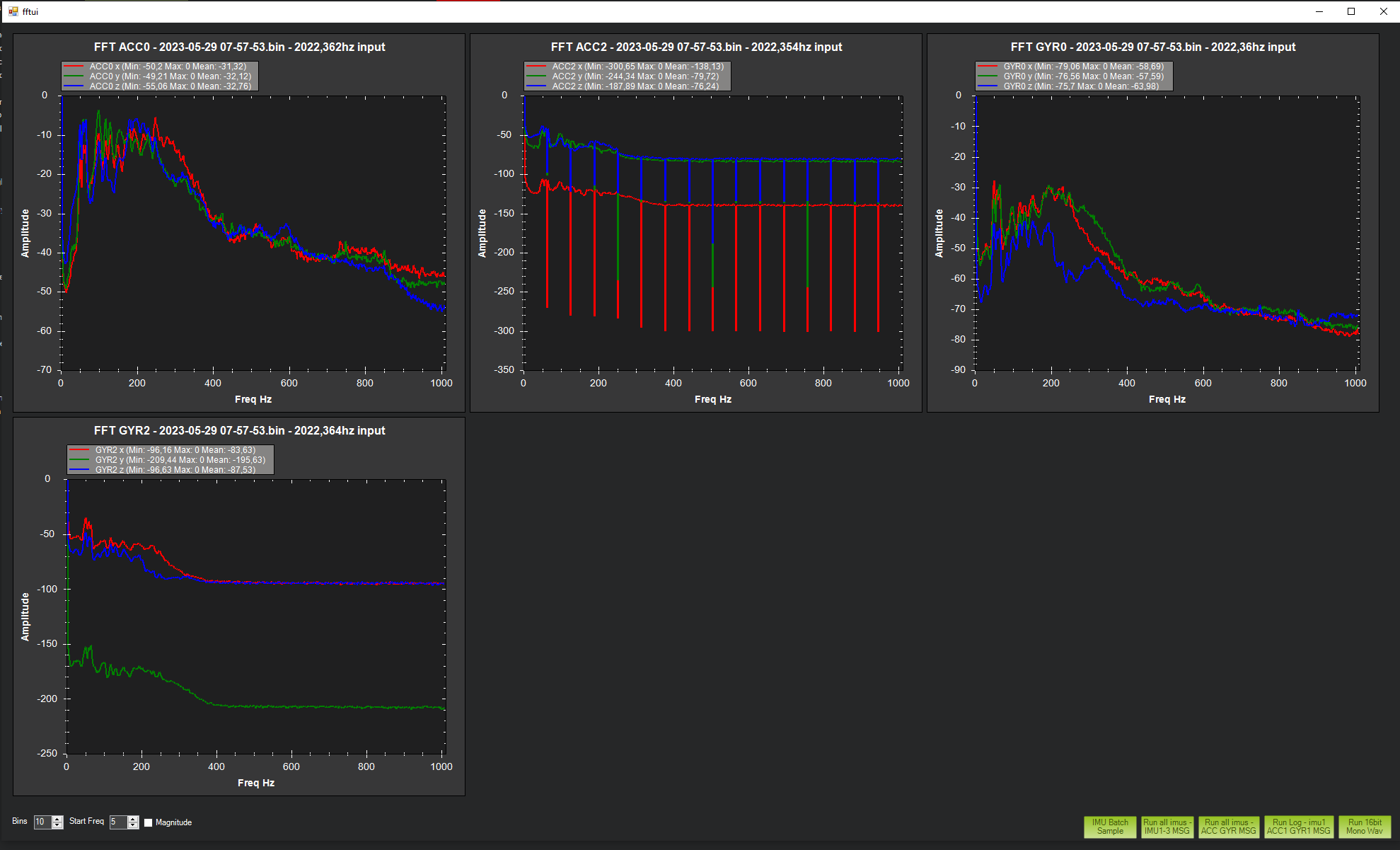
Reducing vibrations a bit further will help. They are not bad, but any improvement will help.
Dont change any compass-related settings yet.
Do all of these, don’t skip any:
ARMING_CHECK,1
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2 or 3
INS_HNTCH_ENABLE,1 // write then refresh params to see the rest
INS_HNTCH_MODE,3
INS_HNTCH_REF,1
INS_HNTCH_FREQ,70
INS_HNTCH_BW,30
LOG_BITMASK,180222
I’ve asked for reduced logging because some of the extra logging excludes useful data, and we’re not debugging anything here, only doing some basic tuning.
What I am concerned about was the rate the battery voltage drops, and at one point it looked like it was going to fall off the “fully-discharged cliff”. Maybe the battery is low C or the voltage calibration is off. Please accurately measure the battery voltage and ensure it matches the reported value from the flight controller. Lower voltages are more important than higher voltages, so one way of checking is to plug in a battery with a lower cell count, like 4S, then do the voltage sensor calibration.
You should also check your BLHELI settings and ensure you have:
Low RPM Power Protect = OFF
Low Voltage Protection = OFF (rely on the flight controller battery settings)
Temperature Protection = 90
Motor Timing = Auto
Once you have set and checked all those things just do a flight with hover, some pitch and roll, but plenty of yaw and circles. Do a figure 8 if you can, and some coordinated turns.
I wanted to give you feedback that the drone is now flying stably and to say thank you again. You guys are real pros at what you do and thank you and Andy for your quick help.
If you have a log with lots of yaw magfit can improve the compass settings. There’s some discussions on how to do that yourself if you want to, just search.
Let us know if you need more help.