47 01-01-1970 05-30-00.bin (973.5 KB)
What happens is while on height of 13 14 feet…i just throttel down to 1 level and its comes down and touchs the ground and goes up again.
link to Video -> https://www.youtube.com/watch?v=XmOzcZUhbOw
47 01-01-1970 05-30-00.bin (973.5 KB)
What happens is while on height of 13 14 feet…i just throttel down to 1 level and its comes down and touchs the ground and goes up again.
link to Video -> https://www.youtube.com/watch?v=XmOzcZUhbOw
There’s not much information in the log.Try doing a hover test again with a higher level of logging.
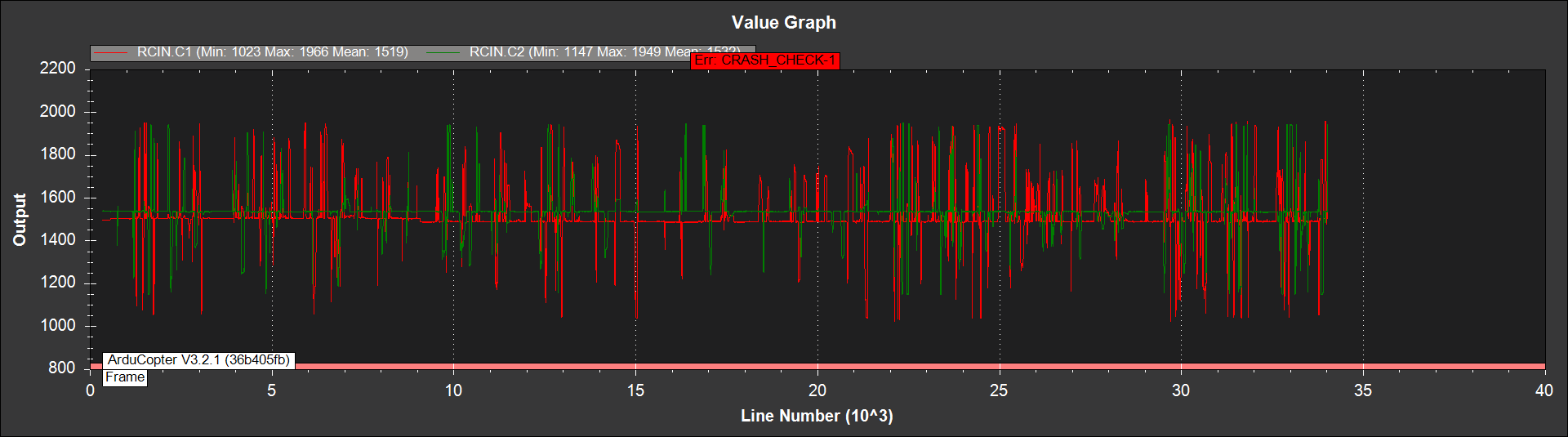
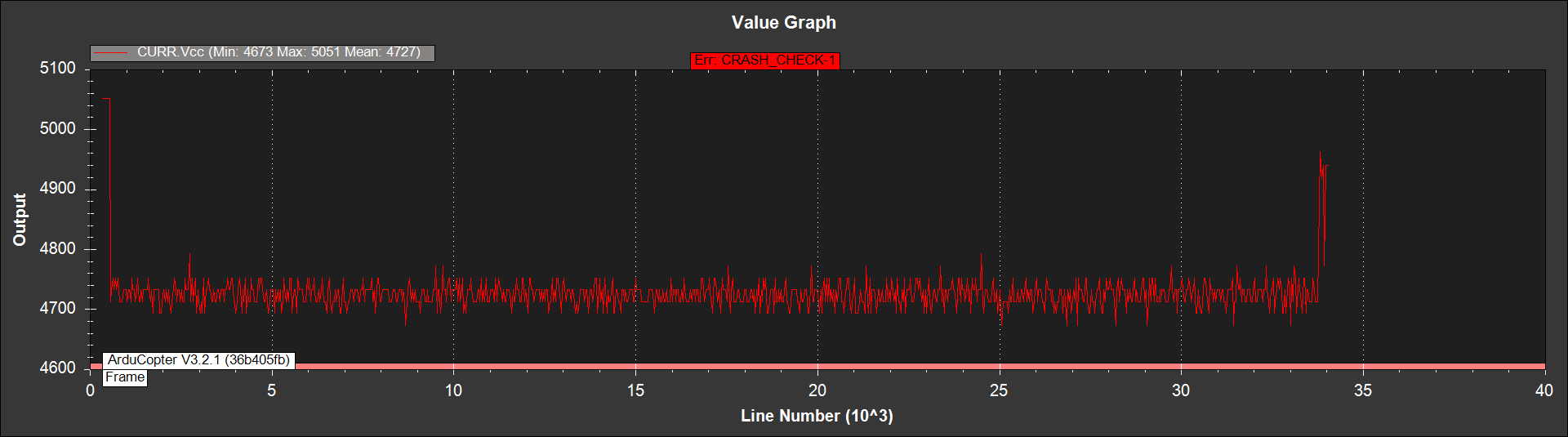
I can’t upload graphs at the minute but your pitch and roll inputs are extremely noisy,your VCC is low (4.7v)and the throttle out does not match throttle in (it’s lower).What are the hardware specs (motors,ESCs, and props especially) ?
Pitch / Roll in is noisy.
Throttle out is lower than throttle in.
<img src="/uploads/default/original/2X/4/4c07794e9b36d9aa51264574ed5bf8e7c8d29012.png" width="690"height=“192”>
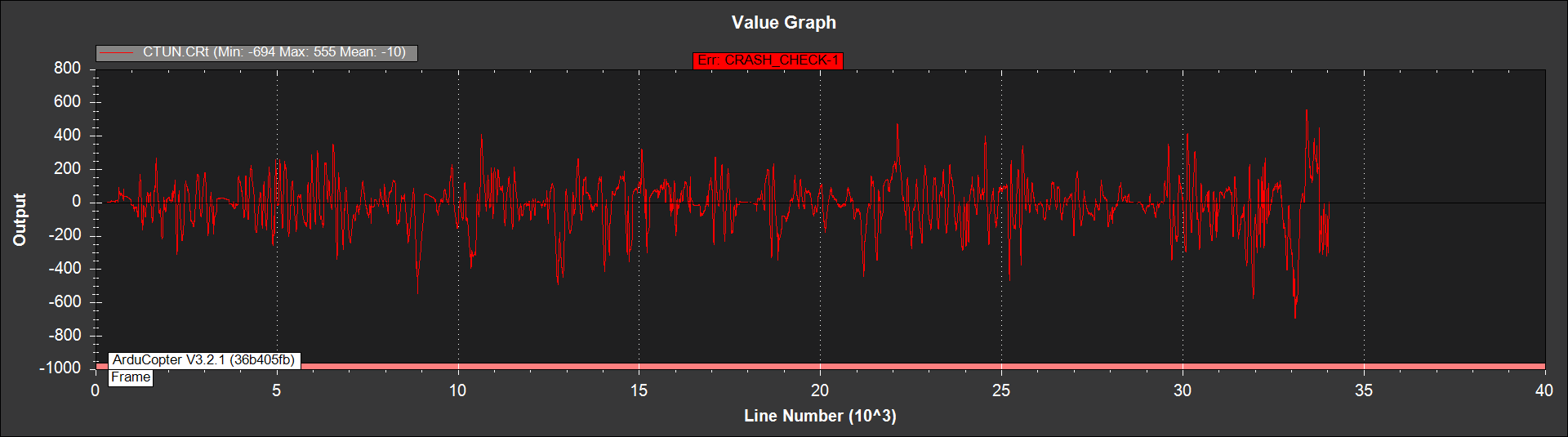
The climb rate matches the video.Lots of minus values.
Low VCC.Losing 0.35v on hook up.Stable after that but a bit low for my liking.
Using a 1000kv 2212 motor , 30amp esc , 1045 prop , tx rx is ct6b , 8000mah 15c battery. Higher level of logging means?
In Config/Tuning/Standard Parameters/Log Bitmask - select default + IMU to log vibration.Revert to default once a hover test is done.
That’s a big battery for those motors.What is the take off weight ?
Have you run an ESC calibration ?
Take off weight is aprox 1200 gms(not more than that). In the motor specs it was written that the can pull 885 gm at 11.1V . I get the quad landed once battery voltage is under 11.0 V. ESC calibration is done(all at once method).
Will be uploading the log today . Got the radio back from friend.