I have installed the new release for a few days, and since then, in Loiter mode, it does not disarm after landing. To disarm I have to switch to stabilize mode. Any suggestions?
Thank you
I suggest you post a bin log file.
1 Like
That link has an access requirement.
Sorry, you can now access the link:https://drive.google.com/drive/folders/1TYLYIgnoqg2CG14ESmLFJSI6YH5zn1wV?usp=sharing
See how on the map the red line (IMU calculated position) and blue line (GPS position) practically never agree, usually due to vibrations
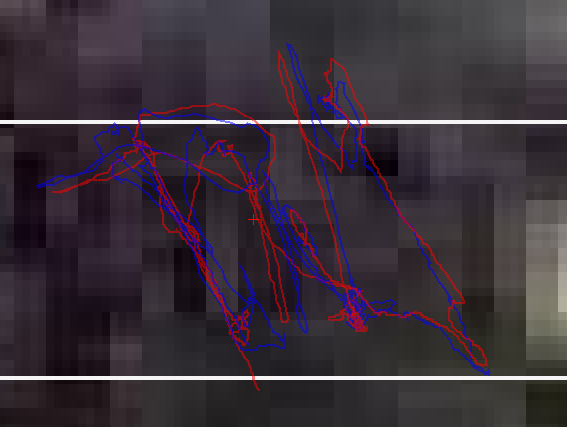
and vibrations are very high. The high vibration make it almost impossible to tell if the craft has landed.
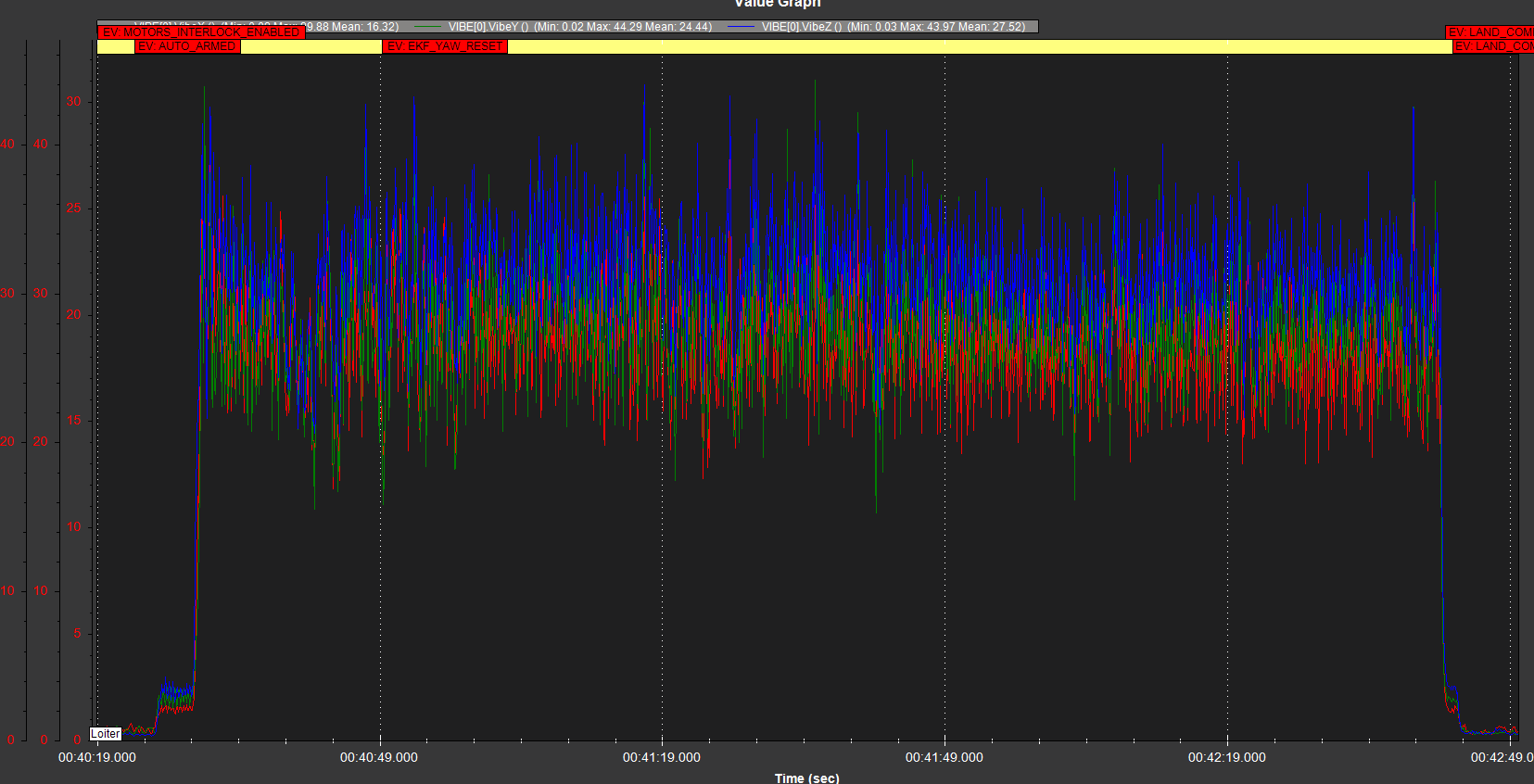
If you can sort that out and do Autotune I think you’ll find landings will be very reliable.
Set INS_HNTCH_REF,0.125 , the rest of your harmonic notch filter params look OK.
Also connect to MissionPlanner , Initial Parameters and put in you battery and prop size to make sure everything is correct (it looks mostly right so far)
then also set these:
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2 ← you are missing this one
FENCE_ENABLE,1
The Fence enable param will prevent you from arming in any mode until there is a good GPS 3D fix. It can take a while and you get used to it, but it means you can always count on a home position being set properly and a better chance of RTL working as expected.
Thank you. I will install the FC on an anti-vibration platform and modify the parameters you suggested.
Sorry, how did you get the graph of the position calculated by the IMU and the one returned by the GNSS?
Thank you