The time has come to hash this out…
I’ve flown unmanned systems for a living for 18 years now. I built my first Arducopter octo/X8 (VulcanUAV Raven) in 2017 and began heavily using Ardupilot builds for mapping and inspection work around 2020.
That said, around 50% of my work is still centered around creative/photography/filming. I do not use dual operator setups for anything and all filming is done with two Inspire 2’s that still ride with me everywhere I go. I need to get rid of them but still do not have an Arducopter/Gremsy solution that can replace them yet.
The number of good videos that I’ve seen from solo operators using Arducopter/Gremsy for film work is “0”
I’ve only seen a few good examples that came from the Airpeak, Astro, etc.
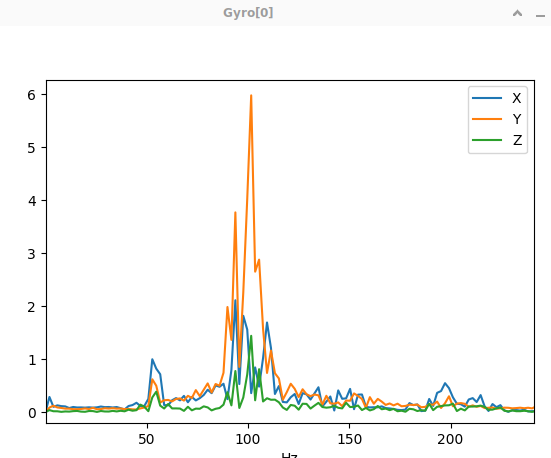
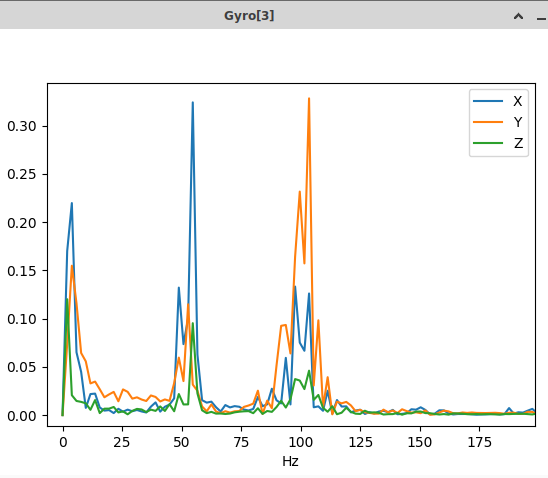
Please review my example from today and let me know what is wrong. The shutter speed is 1/400 as I’m still waiting for an ND to arrive for this particular lense. That said, I’ve filmed on MANY occassions with shutter speeds in excess of 1/400 without any of this warbling, etc.
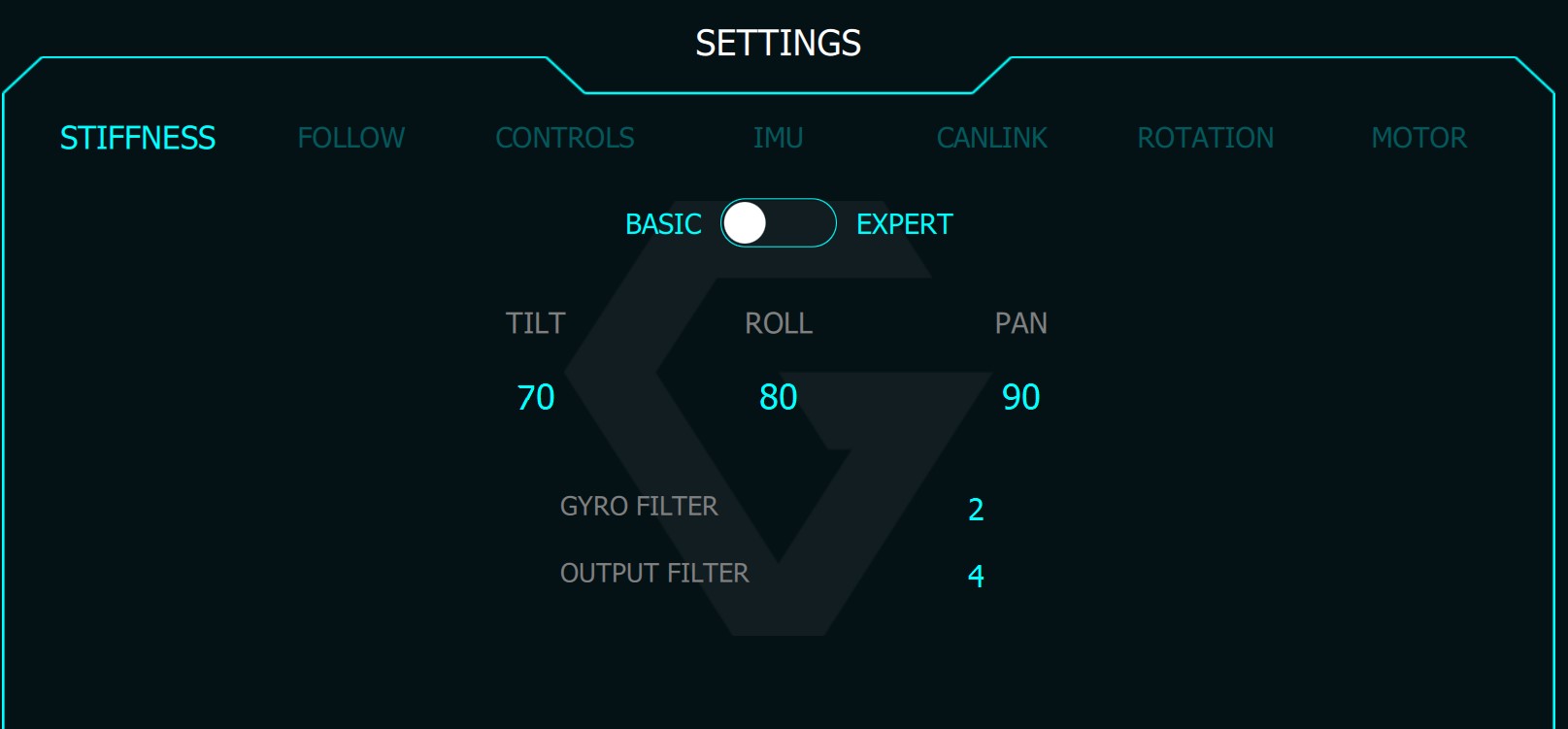
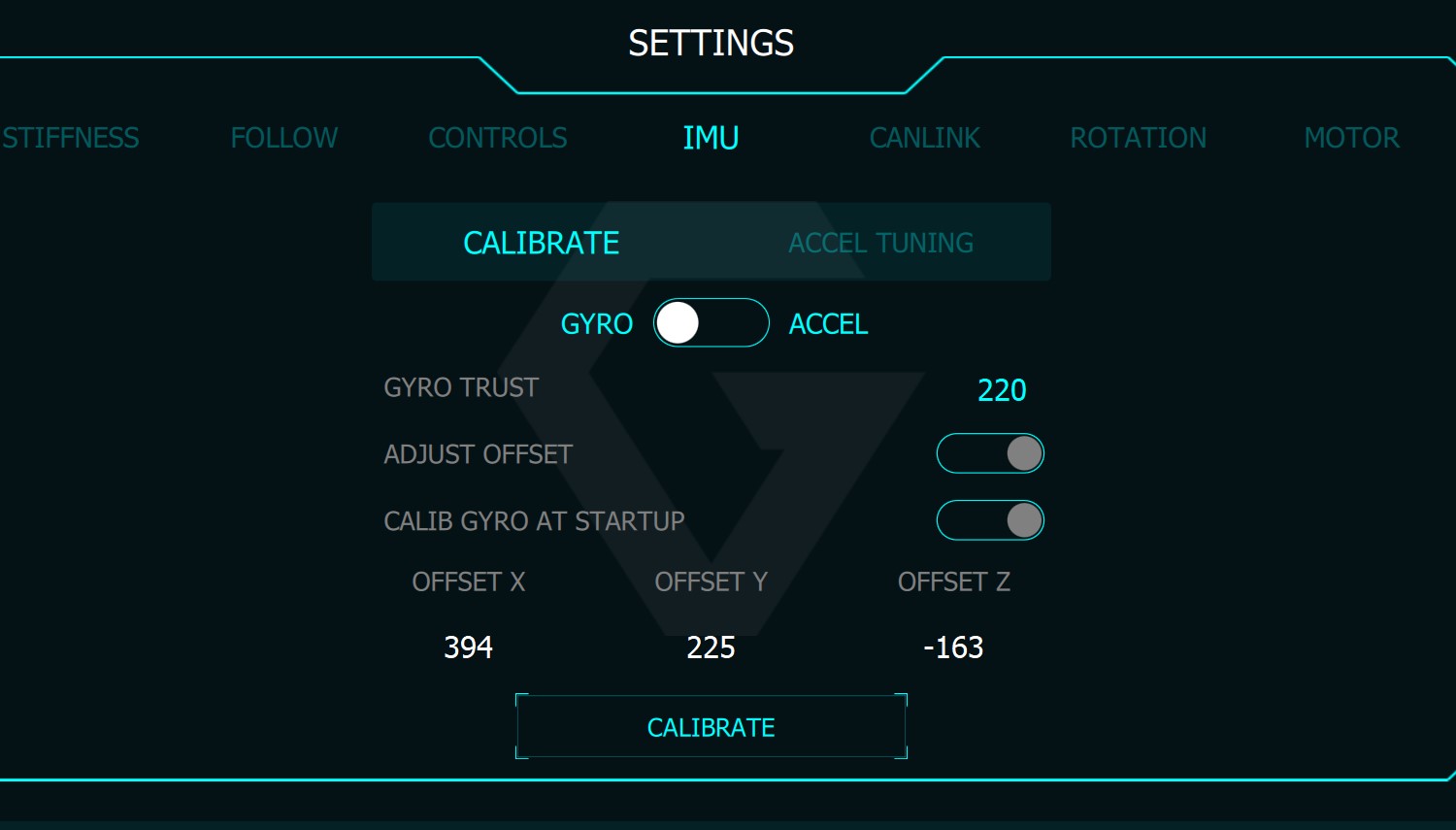
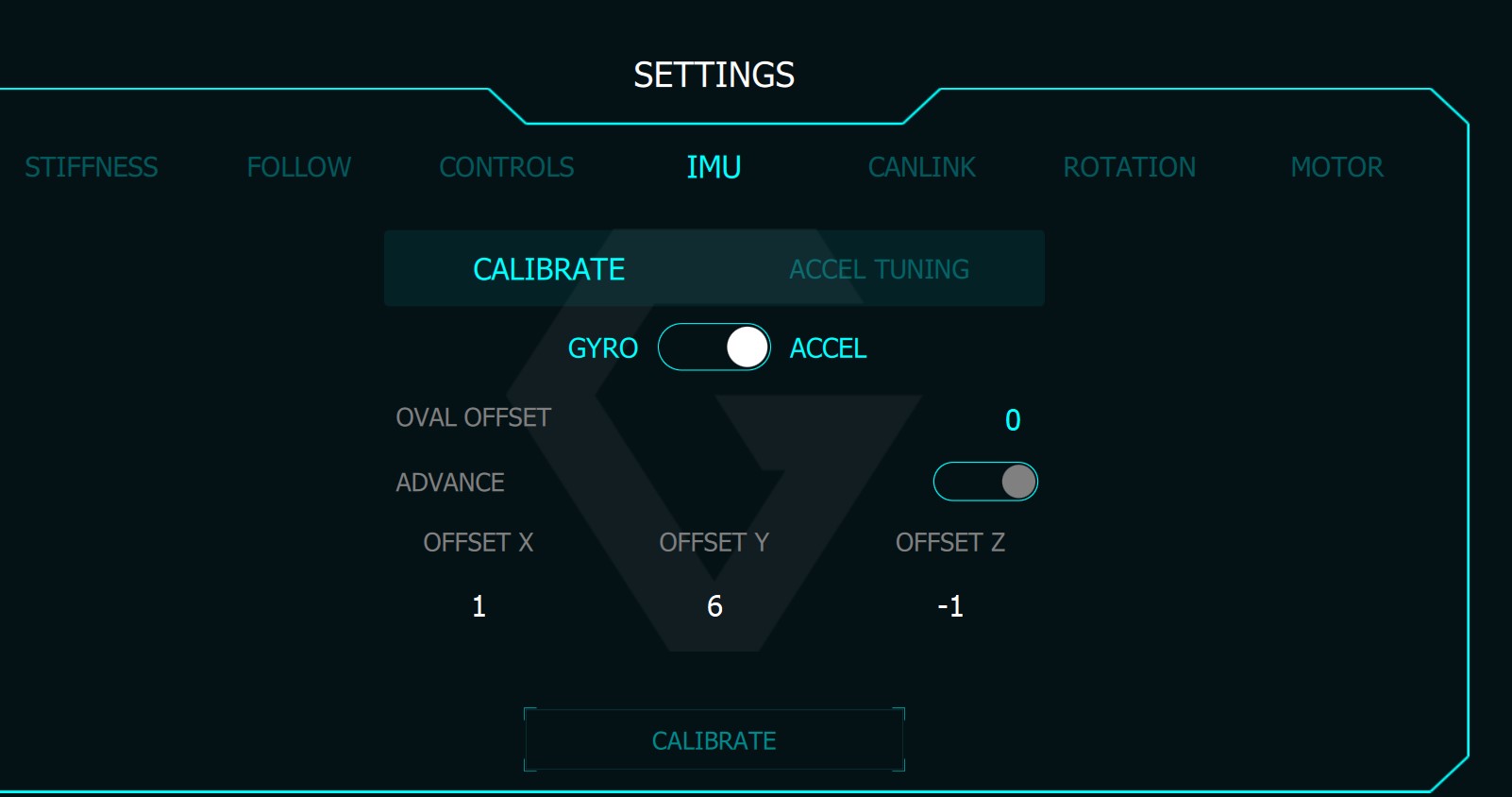
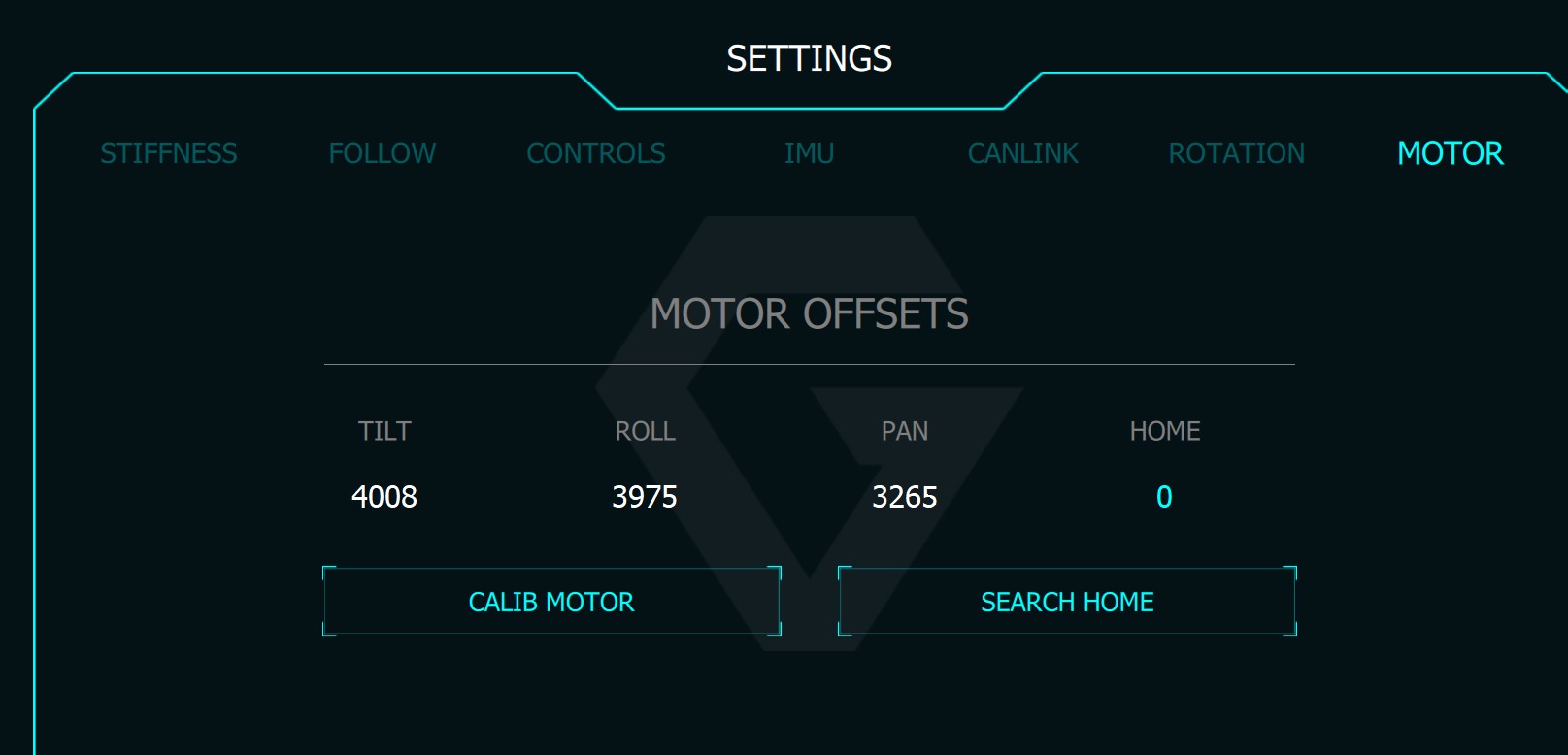
If it’s a gimbal gains issue, what should they be for this camera?
If it’s an issue with the stock T3V3 dampers, which should I use?
I’m not able to perform smooth arcs around the subject since my yaw tends to overspeed the camera. I’m sure this is an expo/deadzone thing and I’ll need to experiment. They are incredibly easy to do with the I2 though so I’ll need to get that figured out for these builds.
Arducopter machines should gain more traction in the days ahead and for all of the obvious reasons (proprietary drone problems, RemoteID, cost, etc.).
If you have an Arducopter setup in conjunction with Gremsy…and it is butter smooth for filming…please comment and share your knowledge.
Thanks in advance
Here is the video from today’s test (custom build with a Gremsy T3V3/Sony A7RIV/24mm):
Here is an example of the work I typically do with the Inspire 2: