Hello everyone.
Yesterday TOW tried to do a QuickTune on a 65Kg aircraft and the aircraft started to move up and down a lot.
I changed the mode from Loiter → AltHold, but there was no change, so I landed it in Stabilize, but the throttle operation was not correct and it landed hard, destroying the battery and the case.
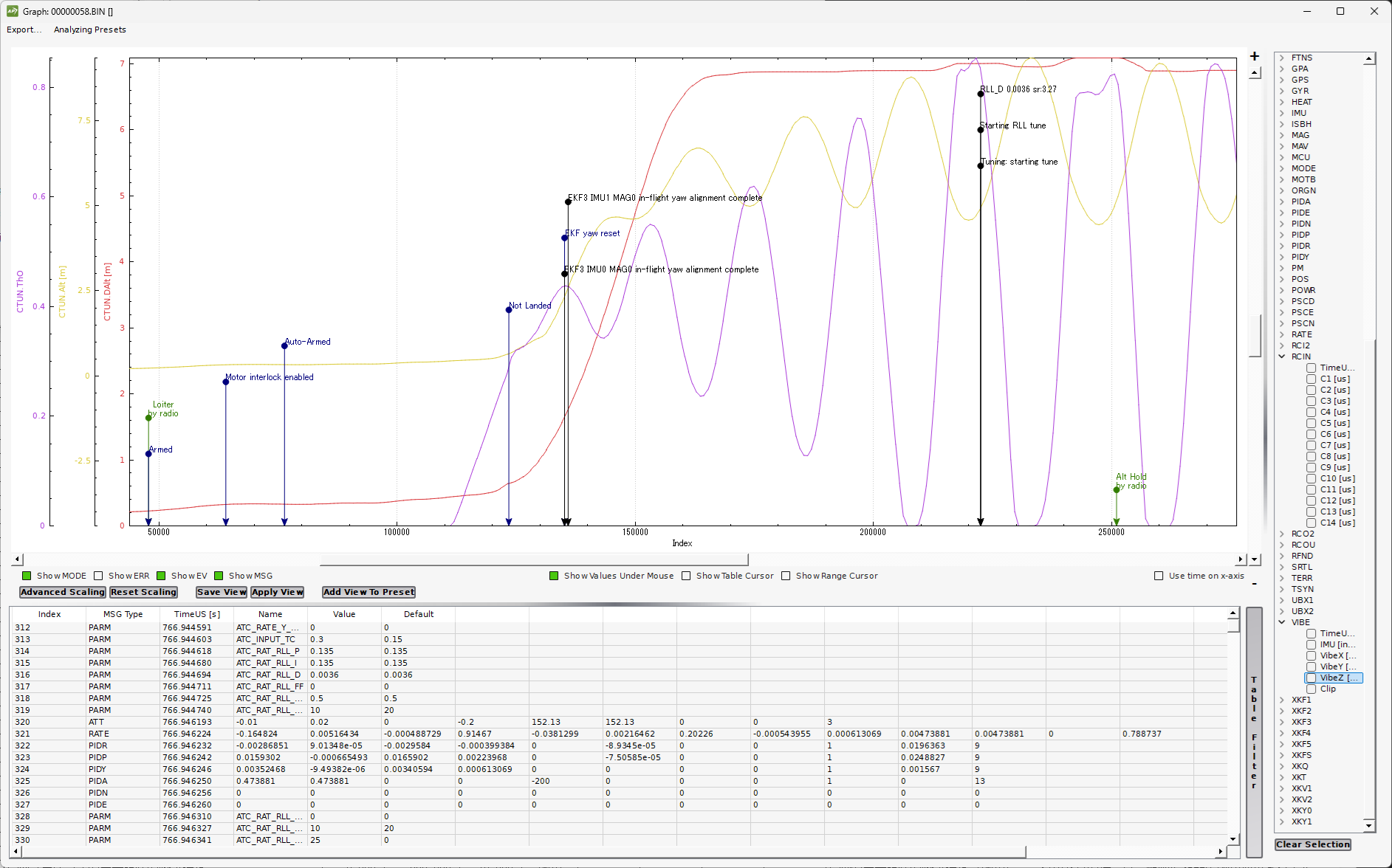
I checked the logs and CTUN.ThO was changing like a sine wave in relation to CTUN.DAlt.
I believe the PID parameters for altitude control are incorrect and am looking into this.
I would like to know which parameter should be checked.
Thank you in advance.
methodic configurator data:
movie: