We have recently been testing a custom 900 class helicopter. We are new to flight control and have only done test flights in Arco mode so far, the next step is to test STABILIZE mode and other non-manual modes and do auto tuning. We are concerned about the possibility of the helicopter crashing in auto mode and would appreciate some suggestions for parameter changes. Thank you for your help.
Once you have tuned the aircraft using the tuning guide, then you need to test in loiter mode. Ensure that it behaves well in loiter. Then test RTL Once you are happy with its behavior in RTL. You are then ready to do an auto mission.
As you are progressing thru testing the higher level modes, always have a safety pilot ready to switch into stabilize mode if the aircraft starts to behave not as expected.
I will try to look at your log file in the coming days.
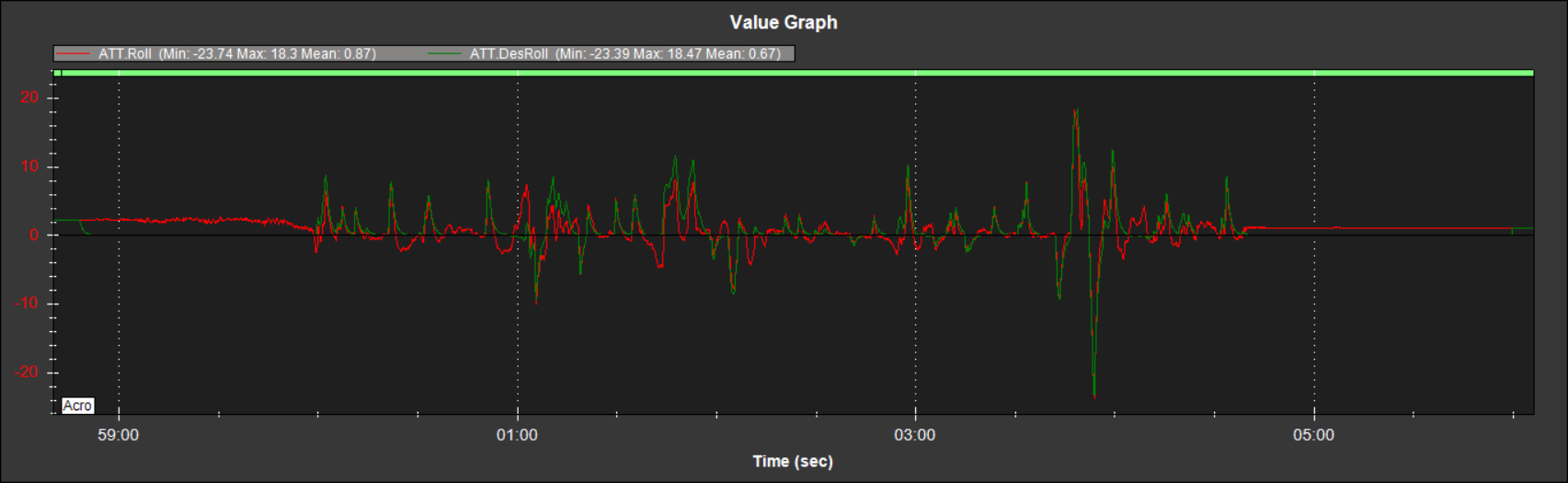
After adjusting the default pid value the helicopter became strange when flying, from the flight logs I found that Roll and DesR basically won’t overlap anymore, the previous logs didn’t have this problem. stab mode needs 600+ ATC_HOVR_ROL_TRM to keep the helicopter from drifting to the left, and the yaw won’t hold, it will slowly turn in one direction. I don’t know if this is normal or not. Finally I tried to go into autotune but it always says AutoTune: pilot overrides active. Even though I have centered the joystick, hope I can get your help
Your aircraft is slowly yawing because your RC deadzone for that axis is 0. Set this to 10 or 15.
That is also probably why it won’t start the autotune because the controller is seeing an input on the yaw axis due to the deadzone being zero.
But before you fly again, you need to fix your swashplate setup. having
SERVO1_TRIM of 1850
SERVO2_TRIM of 1196
SERVO3_TRIM of 1143
is probably not good. I designed the swashplate algorithm to have the trims around 1500. Your swashplate setup seems to work but I would be concerned that something bad could happen.
Please follow the swashplate instructions in the tradheli wiki.
DO NOT FLY UNTIL YOU FIX THESE!
Thanks for your reply, I will reinstall the servos so that the trim value is around 1500. Regarding the poor performance of the roll axis in this log what is causing it? The roll axis performance seems normal in the previous logs.
I think that stems from the swashplate set up. If you didn’t level your swashplate then the I term will saturate and not hold the roll attitude. This could also be what is causing the high roll trim values.
I have read the page carefully before and my swashplate settings should be leveled except for the servo trim which is inconsistent and all other settings are set according to the instructions. Since this plane has flown with other flight controls before as far as I know, I mistakenly thought this wouldn’t have much effect so I didn’t adjust the servo to bring the trim up to 1500.
You can check the log of my first flight, the roll axis looks correct in that log, I don’t think it’s a swashplate problem. After that time I just set the relevant parameters and static filtering according to preparing for tuning.
I think that the P gains being non-zero in your initial flights probably contributed to it holding roll attitude better. Truthfully though, the Integrator in the message PIDR.I should be < 0.02 to say that you have a well trimmed roll or pitch axis. And the way you get the Integrator to those values is to adjust the swashplate tilt. you may have had it level but there is still something causing a requirement for steady roll input.
Also if you were adjusting the ATC_HOVR_RLL_TRM param and thinking that it would affect the ACRO mode, I don’t think it does. That parameter affects all other modes except acro. I’m almost 90 % certain of that. So check that the aircraft doesn’t drift in stabilize mode for a given ATC_HOVR_RLL_TRM value. But be sure that the desired and actual roll values are tracking.
Thinking about this more. If you had some off center CG laterally, that could cause the additional roll input to get the aircraft to hover at an attitude. The big thing is that you should fly it on a windless day and then from the log determine what your ATC_HOVR_RLL_TRM should be. it would be the roll attitude in centidegrees to hover.
If your Integrator is not near center once the ATC_HOVR_RLL_TRM is set properly then adjust the swashplate.
I recently did an auto-tune and it started out fine. However, the message AutoTune: Exceeded frequency range appears at the beginning of the angleP.
After increasing FRQ_max to 90, the message still appeared, and the helicopter was already shaking so much that I didn’t want to keep increasing the frequency.
Then I skipped the anglep, but the rateD and rateP of the yaw axis are still out of range. I need to get your help, thanks.