Hi there,
I have a Benewake TF02 LiDAR that I would like to install on the GPS2 port on my Pixhawk 2.1 Cube. If I understand correctly, Serial (UART) 4 connected to the GPS2 port on the Pixhawk, I have set up everything as per the instructions on the wiki:
http://ardupilot.org/plane/docs/common-benewake-tf02-lidar.html?highlight=lidar
However, very strange things happen when it is plugged in: The HERE GPS module (in GPS1 port) won’t go on if powered up with the LiDAR plugged in to GPS2. However, if powered up without the LiDAR plugged in, the HERE GPS goes on, if the LiDAR is then plugged in after power up, the HERE GPS stays on. BUT, if the LiDAR is moved at all, the HERE GPS goes off and I get erratic airspeed measurements (I have a MS5525 airspeed sensor on I2C internal bus 0).
I am 110% sure that the wiring is correct, that 5V and GND is not switched, and Tx/Rx pairs are correctly wired, as per the PH 2.1 datasheet:
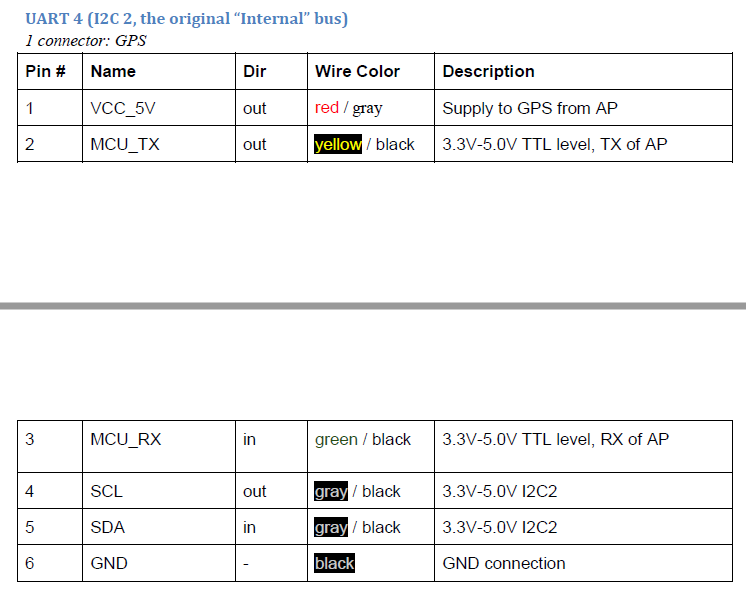
I have thought of various possibilities, that it’s drawing too much power (the LiDAR is rated at 1W, so 200mA at 5V), but that would not explain the erratic airspeed readings (up to 50m/s jumps and back to 0). If anyone can help give me a clue as to what may be the issue, I’ll be very grateful.
Thank you!