Good day all
Got myself a TFmini Plus and have been working to get this going on a Hexcopter, Pixhack V3x.
Copter 4.03 FW.
Followed this doc:
But I found this discussion on the this forum
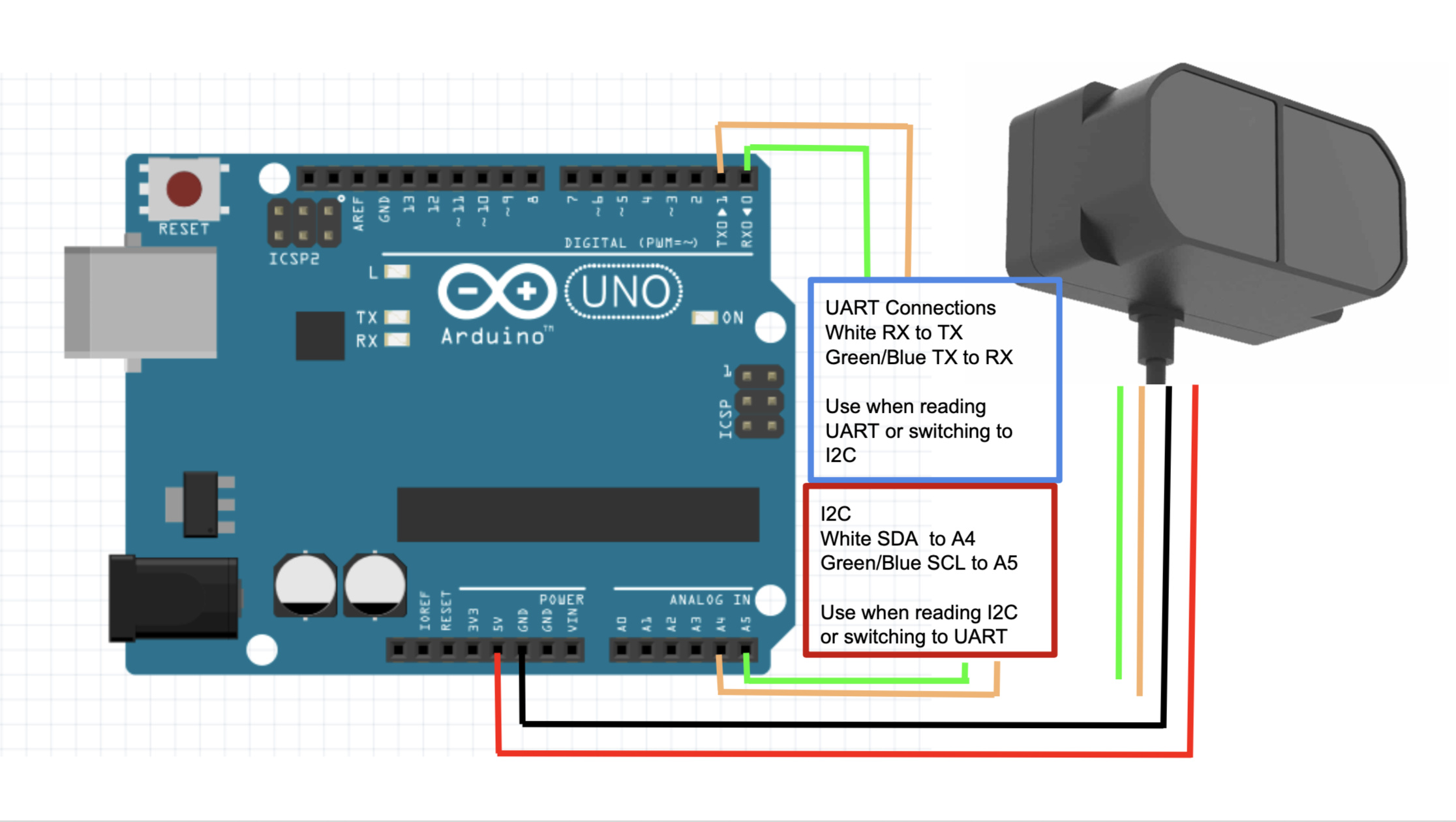
TFmini plus ,avoidance and arduino
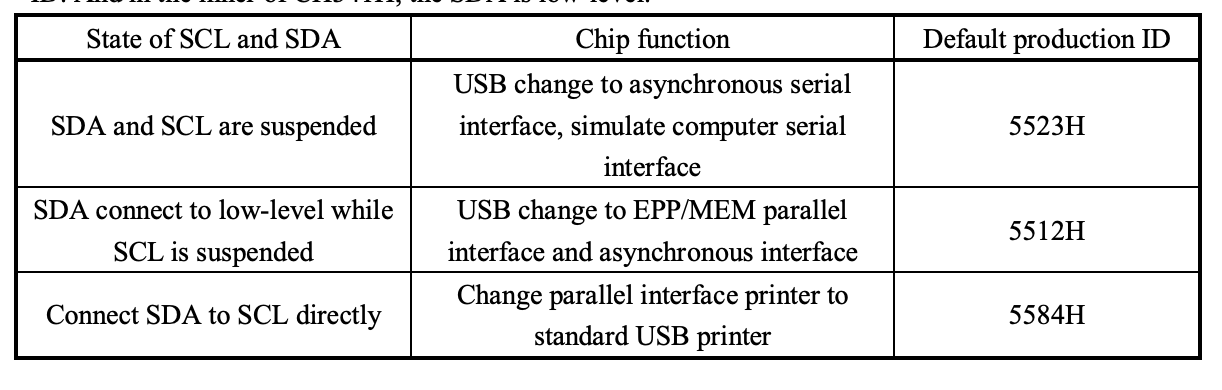
which seem to suggest that TFminiPlus will only work with I2C comms.
The date on this discussion was Oct 2019 and the release notes had an entry also around
Oct 2019 about TFminiplus support
Copter 3.6.11 01-Oct-2019 / 3.6.11-rc1 16-Sep-2019
Changes from 3.6.10
- EKF and IMU improvements:
a) IMU3 enabled by default if present
b) IMU3 fast sampling enabled by default on Cube autopilots
c) EKF protection against large baro spikes causing attitude error
d) EKF origin fixes (consistent across cores, set externally only when not using GPS)
e) EKF logging of 3rd core - Minor enhancements:
a) Land mode supports heading requests (ie. ROI)
b) Support Hexa-H frame
c) MatekF405-STD binaries created
d) Benewake TFminiPlus lidar support
Can I assume that this does not mean that from 3.6.11 upwards there has been additional
support ? i.e. it will still only work with I2C?
I would just like to confirm that my interpretation is correct which means I will have to get the I2C
and not waste any more time trying to get the UART version to work ? Unless ofcourse I use
an arduino, which is eventually the idea, but for a start I thought I would just use a single
LIDAR directly onto my FC.
Many thanks
John