Hi all,
New to the blog, not new to ArduPilot but experience may be low relative to others.
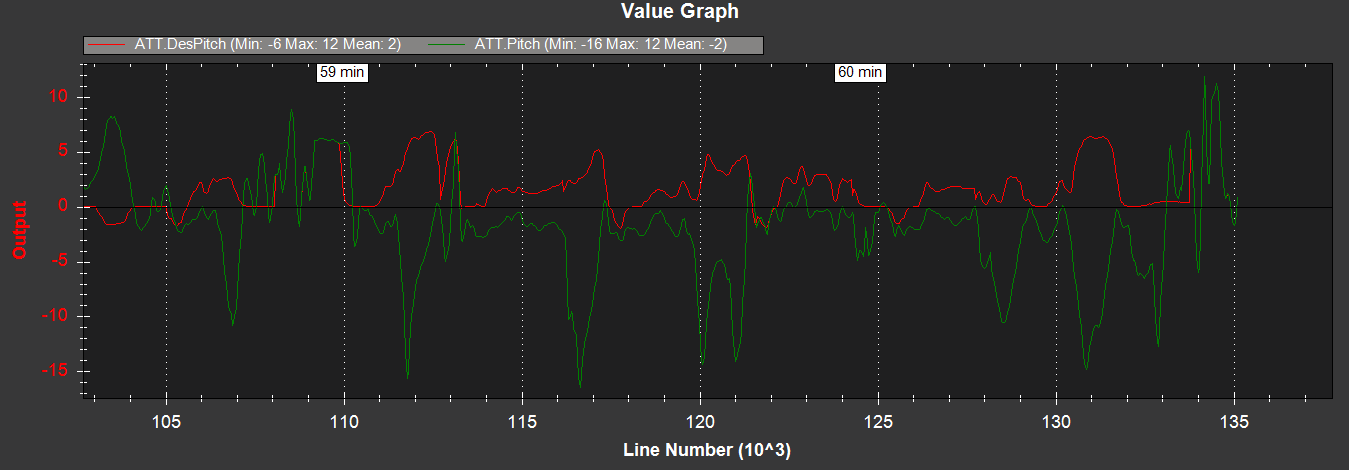
I have a tethered quad that will intermittently “freak out” while trying to obtain a stable hover. The behavior is frustratingly inconsistent. The tether is long enough so as to avoid impeding the copter’s motion. When viewing my DataFlash logs, the root issue is presenting itself when plotting “desired pitch” against “actual pitch”. During some hovers, the vehicle was rock solid in stabilize mode without any RC input. During the failed hovers, the desired pitch would change drastically as a response to the actual pitch, causing the copter to pitch around wildly before being disarmed (plotted below).
This behavior is present in roll as well, but is more drastic in pitch, possibly because the copter is not symmetric, and the roll moment arm is much longer than that of pitch. The frustrating thing is that, without any changes, the copter will sometimes function beautifully, and performance will slowly deteriorate throughout the course of a few flights, or some days it will just decide to not work.
I’d appreciate any insight/tips in troubleshooting.
Thanks,
Thomas
My experience level might be lower than yours, but as far as I know desiredPitch does not get influenced by ActualPitch. On a well tuned copter it’s the other way round, i.e. pitch follows DesiredPitch. Which leads me to wonder where the change in desired Pitch is coming from in your case. What flight mode are you using? In stabilize mode I think nothing except RC command would cause a desired pitch other than 0.
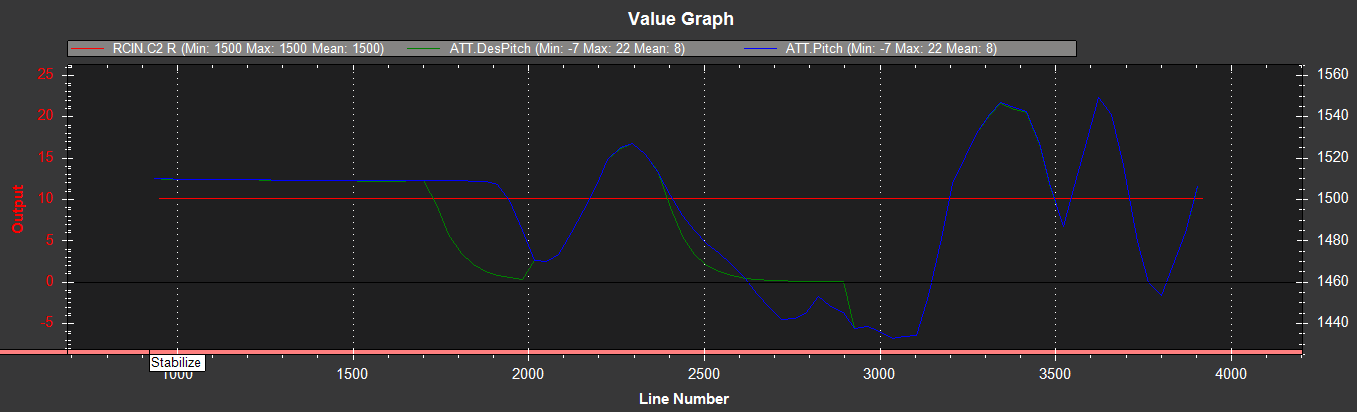
@CLabeck, you are correct. I am using stabilize mode. Here is a more clear representation of the issue, showing RCin 2 (pitch on a mode 2 transmitter) staying constant at 1500, while desired pitch jumps all over the place in stabilize mode.
@mboland, as requested, here is the .bin file and .txt log file from the same hover attempt that I have just referenced. As stated, desired pitch jumps around wildly without any RC input, when it should just go to zero.
Have you autotune this copter?
Theres plenty of power but as you observed very large discrepancies between desired and actual roll and pitch at times, not always.
So you have some motors shutting down to try and maintain stability.