Dual-arc directional automatic cruise unmanned vehicle test
Due to the instability of the magnetic compass and its vulnerability to hard and soft magnetic interference, we used the Novatai 617D dual-antenna DF board on the Rover’s unmanned vehicle firmware. The output heading information, was replaced by the heading information of the original magnetic compass.This eliminates the need for cumbersome calibration of the magnetic compass. Furthermore, it completely avoids hard and soft magnetic interference.To a certain extent, it improves the stability of the system . In fact, this replacement can also be done on the drone, when a drone is at a high altitude and the heading information is better.
Real-time obstacle avoidance test
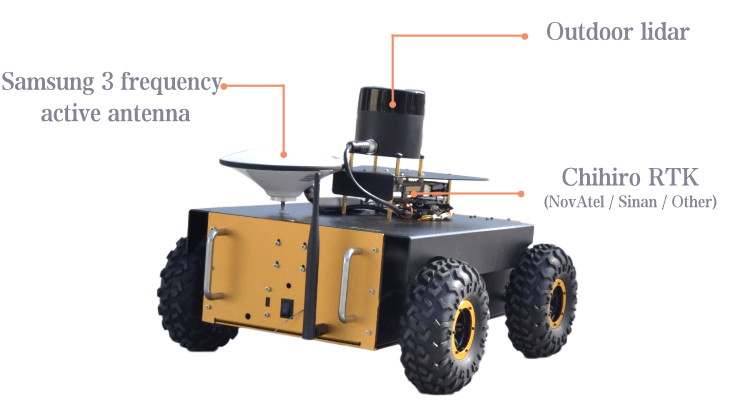
This unmanned vehicle system includes:
1- thousand search RTK centimeter positioning
2- outdoor Lidar obstacle avoidance (based on the VFH obstacle avoidance strategy);
the full name of VFH is Vector Field Histogram, which is the vector interval column
diagram method)
3-direction finding with dual antenna direction finding replacement magnetic compass
4- EKF-based condition and position estimation
5- a complete ROS interface and MAVLINK interface
By just transmitting the desired speed or desired position, this unmanned vehicle chassis can respond to many complex instructions including obstacle avoidance.
Amovlab sells this platform for researchers and developers, and can be found at the background, or at AmovLab’s website on Taobao.

The article has been revised in 2018-12-4
Stay tuned for development and upgrades.