Testing of the aircraft with the HOLYBRO DURANDAL flight controller for resistance to large vibrations. I didn’t use notched filters to find out how dangerous it is to fly with large vibrations. There were reports of EKF work, but the plane did not crash. After this flight, I will improve the vibration isolation and apply dynamic harmonic notches with an engine speed sensor.
I would be grateful for advice on improving vibration resistance from users of aircraft with an internal combustion engine.
Trener DOMINO SIZE .46-.55 GP/EP SCALE 1:6 ARF, Holybro Durandal FW 4.2.0 ARDUPLANE,
Whilst I’m not a specialist in regards to harmonic notch filtering, the rather important thing is to reduce vibrations as much as possible from start when building / assembling the aircraft. I.e. use appropriate vibration dampening when mounting FC.
Think of the harmonic notch filtering more of a seatbealt in your car kind of arrangement. …just because it’s there you don’t want to have an accident just to see how effective it is.
You are right! The effect of vibration must be eliminated because it destroys the flight controller - the resource decreases. In my first flight, I applied additional vibration isolation of the flight controller, but the engine is installed without vibration isolation. Not all methods are used yet, it sounds optimistic because when everything is used but the design does not work optimally this situation is bad for the health of the head. I will use the reasoning of the participants in this test
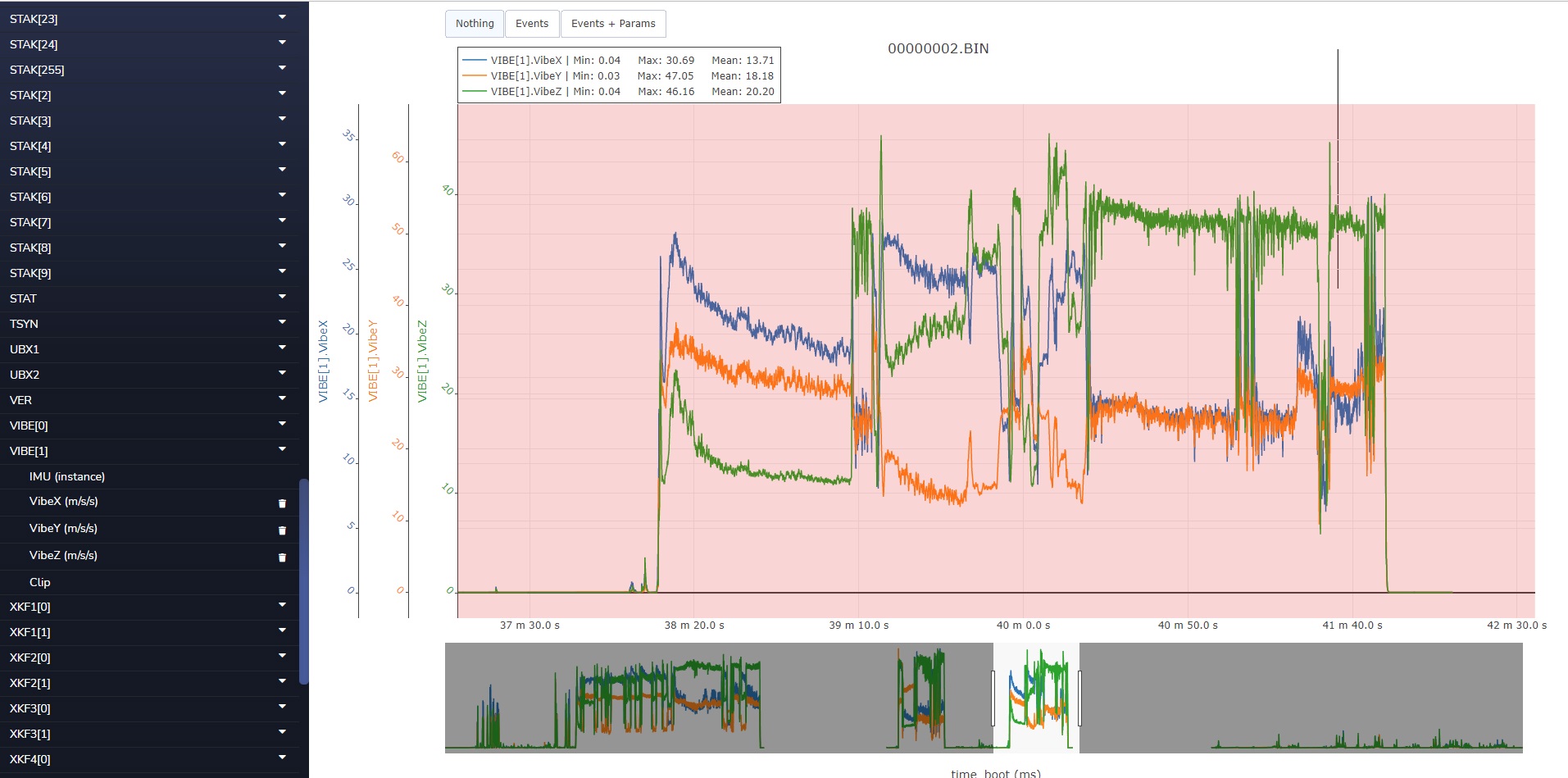
I installed vibration isolation on the motor, the vibration became less to the recommended value of not more than 60 m / s / s.
Vibration levels below 30m/s/s are normally acceptable. Levels above 30m/s/s may have problems and levels above 60m/s/s nearly always have problems with position or altitude hold.