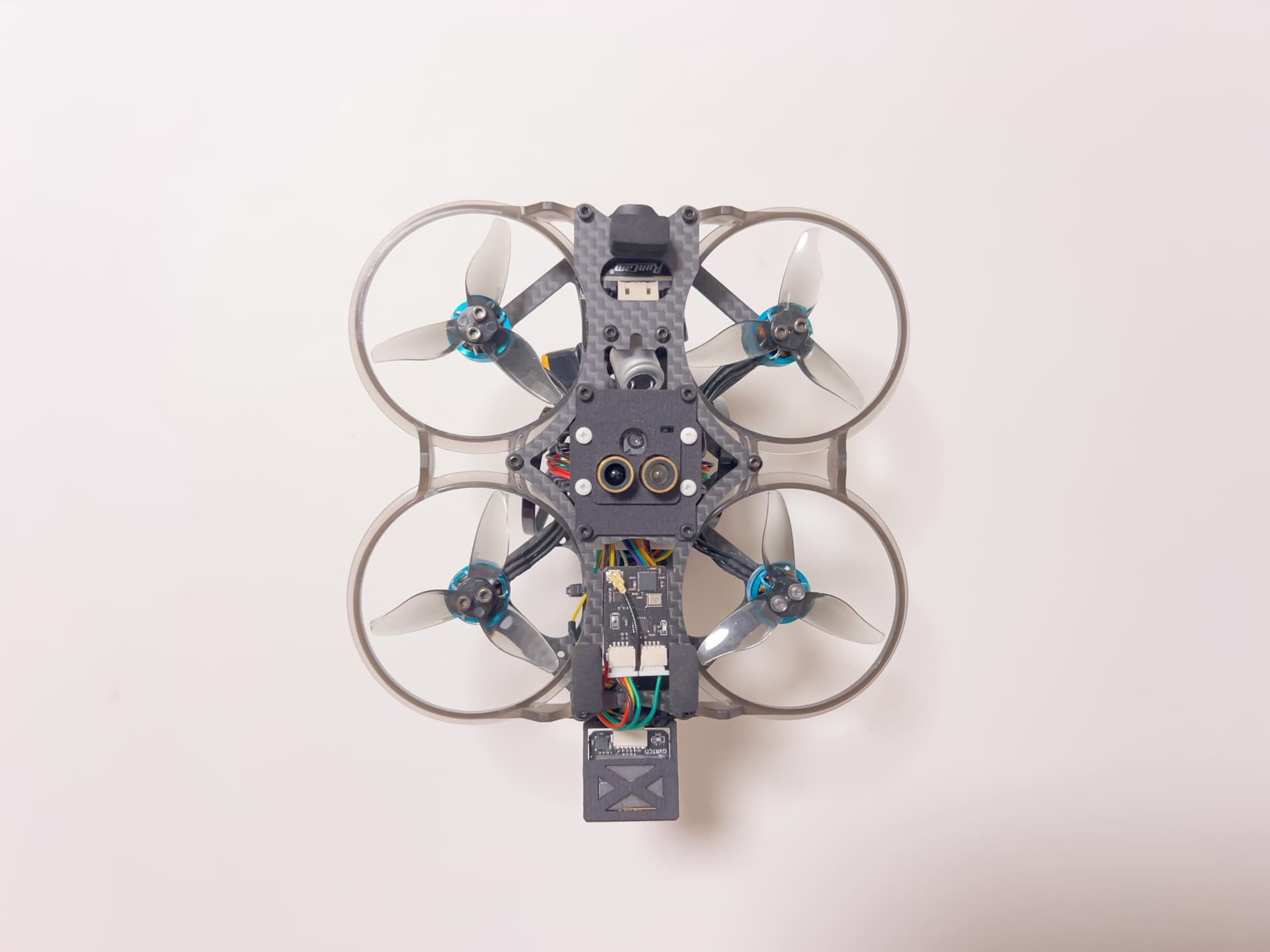
I wanted to share my recent experience testing out a new integrated optical flow and lidar sensor. The Micoair MTF-01 optical flow and lidar sensor combines a high-power laser distance measuring module with an optical flow sensor, all neatly packed into a small design. The high-power laser ensures accurate height information even when flying outdoors, improving the accuracy of optical flow positioning. Plus, its compact size means you can install it on smaller drones - perfect for my 2-inch FPV setup.
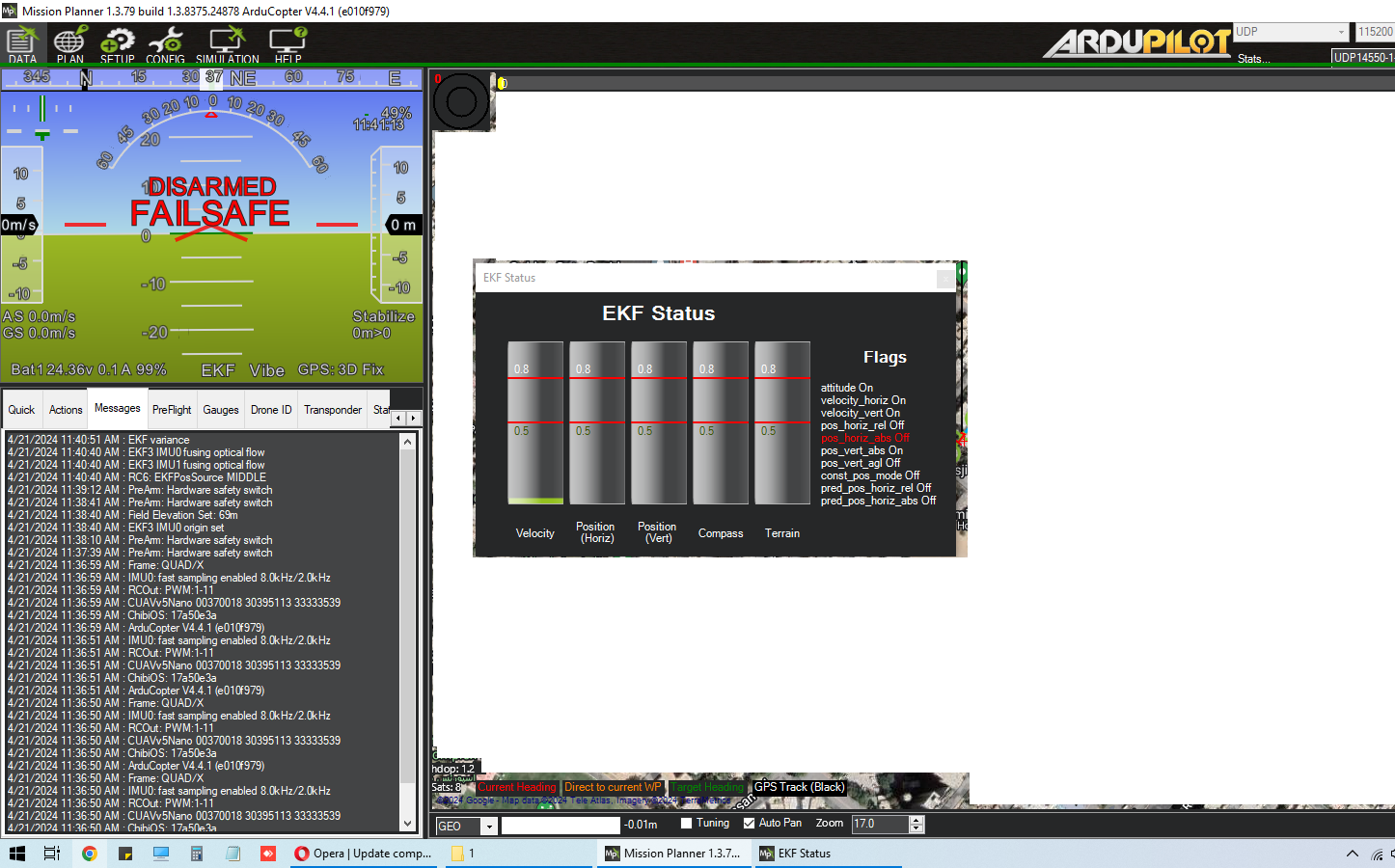
I tried to use the sensor in my quadcopter for indoor flight, but when I try to switch to Loiter mode it gives the message: “Mode change to LOITER failed: requires position” and it says in the dashboard: “PreArm: GPS1: Bad fix”
I bought 2 pcs from different vendor. Both are not working.
I am using the following hardware
Cuav x5 nano flight controller.
Quadcopter Frame size 600 mm
using Ardupilot 4.4.1
I followed each & every step as described by the Manufacturer.
But I am getting error of EKF3 pos_horiz_abs Off
See the EKF window error in the attached screenshot.
I’m trying to measure the velocity of water moving in a river - do you know if one were to keep the drone stationary using GPS while hovering above the river, could this sensor accurately measure the velocity of the water? Thanks!