I tested the compass_learn=3 today.
Attached are two MagFit charts. The first is MagFit of my copter flying with compass calibration settings from before installing 4.2.0-RC1.
The second is of MagFit of the copter flying after calibrating the compass using compass_learn=3 to calibrate the compass.
There’s a difference - but even after running compass_learn=3, MagFit shows improvements can be made.
When I run MagFit I select both elliptical and MOT options. Just a guess, but I’m thinking that maybe compass_learn=3 doesn’t account for motor interference.
I’ve floated the question before - with both options available, should one be chosen over the other?
Before compass_learn=3:

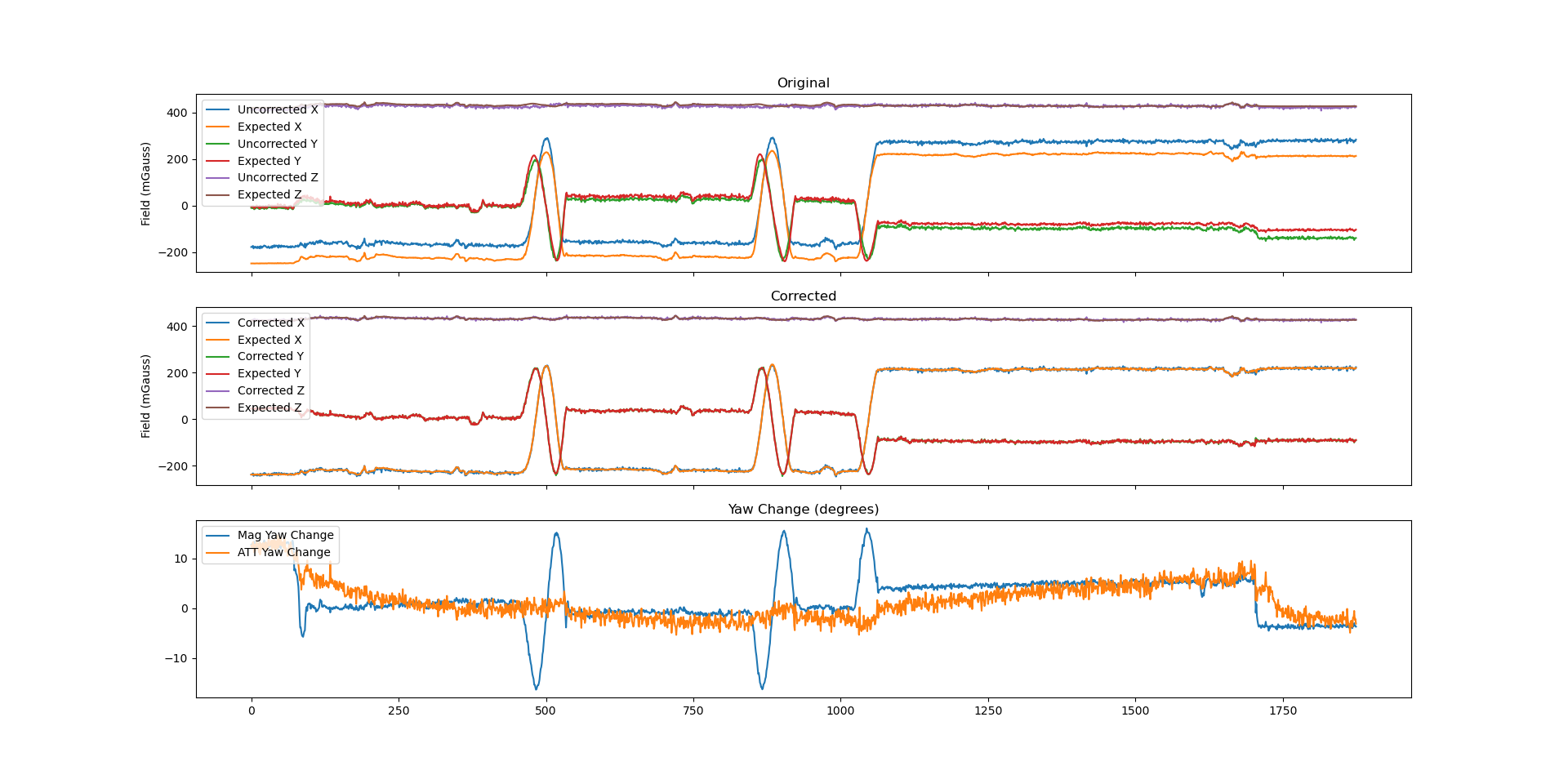
After compass_learn=3: