Hello,
I built a copter using Navio2 to allow for computer control in the future. But at the moment I am flying with RC because I can’t get the copter to stop oscillating while flying. I have tried adjusting PID’s but to no success. I have linked a video bellow. Any other ideas of settings I can change in Ardupilot? If you need any other data please let me know!
1 Like
Please attach the logs of the flight, and it what mode it was during the flight?
1 Like
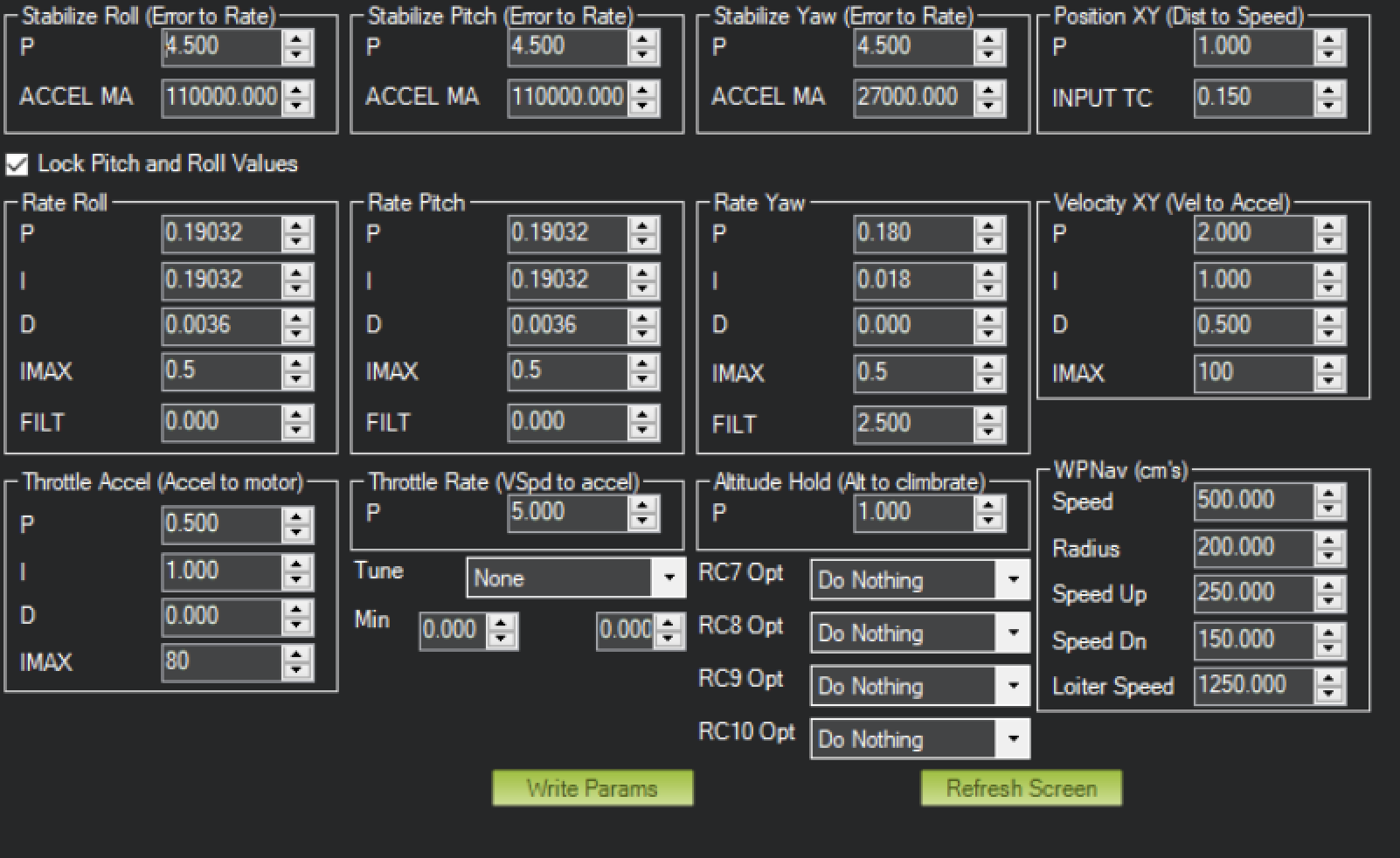
What are your PID settings? Send me a screenshot!
1 Like
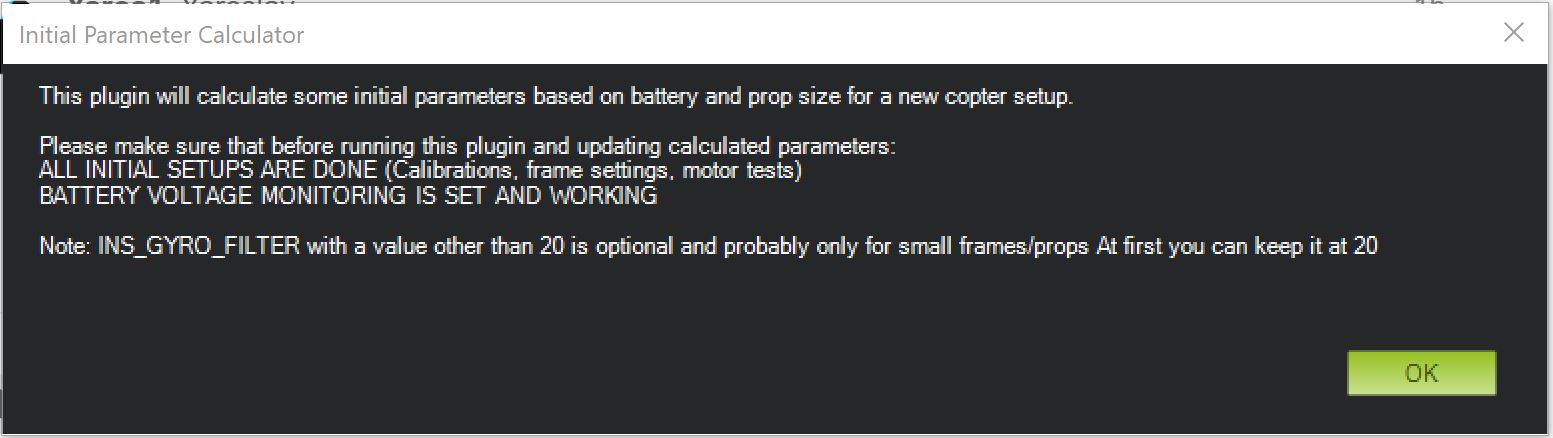
This is the typical response to a small quad flying on default parameters (filters). Use Mission Planners Alt>A plug-in (after connecting) enter values as prompted and make the changes shown. Then you will be at pre-flight settings.
Your PID adjustements were likely futile or worse. Set them back to default before changing the above.
1 Like
Thank you for the response. I have attached a dropbox link with the flight log and bin. I attached a screen shot of the PID’s but like @dkemxr said, I reset most of them to default because it didn’t seem to make any major effect. I will try the pre-flight settings tomorrow!
1 Like
I don’t see a link in the post.
1 Like
In which mode are you flying?try calibrating accelrometer again.i think it vibration problem.
I think you sould try uploading a new firmware.
It was flying in Stabilization mode, I have tried calibrating accelerometer’s before but can try again after updating firmware
2 Likes
I don’t think the ropes holding on are going to help the tuning. Can you try it somewhere that you have room and don’t need to tie it down?
1 Like
Your PID’s are WAY TOO HIGH for a quad this size!!
Start with something small, like 0.115 on P and I both Roll and Pitch!
1 Like
If your quad starts to oscillate very slowly (seems like it’s on waves) then set the P and I a little bit higher, if it’s still oscilating, lower them more, but not less than 0.100
Also vibrations may cause this effect because accelerometers shake and can’t stabilize the frame. Try putting the board on something soft if PIDs don’t solve the problem
1 Like
As I said this is the typical response to a small quad on default parameters. If you only changed (raised) the Rate filters and the Gyro filter it would probably fly but simply use the Mission Planner Plug-in and that will sort the initial tuning parameters.
2 Likes
I lowered the roll and pitch P/I and no change. I also connect and was unable to do CTRL A. Nothing happened in mission planner.
1 Like
What are your current PID’s?
1 Like
Of course not because it’s not a PID P/I problem. Update Mission Planner to latest Beta from the Help screen. Then connect to the craft and press Ctrl>A This menu will pop up. If nothing happens click anywhere on the screen and try again.
If you can’t manage the Plug-in then use the Excel version of it:
Initial parameters.zip (3.7 KB)
And go here and read about pre-flight initial tuning.
https://ardupilot.org/copter/docs/tuning-process-instructions.html
2 Likes
He posted the log, extract the parameters and look for your self. But this is not the problem at hand.
1 Like
So I updated the Mission Planner to the latest beta like you suggested. I tried Ctrl A again to no avail (I don’t know why I can’t get this menu to pop up). I used the excel sheet, setting it to 5" props, and wrote all the updated parameters. This definitely made it better but not perfect. It still shakes a lot in a low thrust but steadies out at a medium thrust level. I have attached another video bellow. I also have a screen shot of my PID’s.
Video: https://imgur.com/a/IesWFRu
Have you got the .bin log from that flight?
1 Like