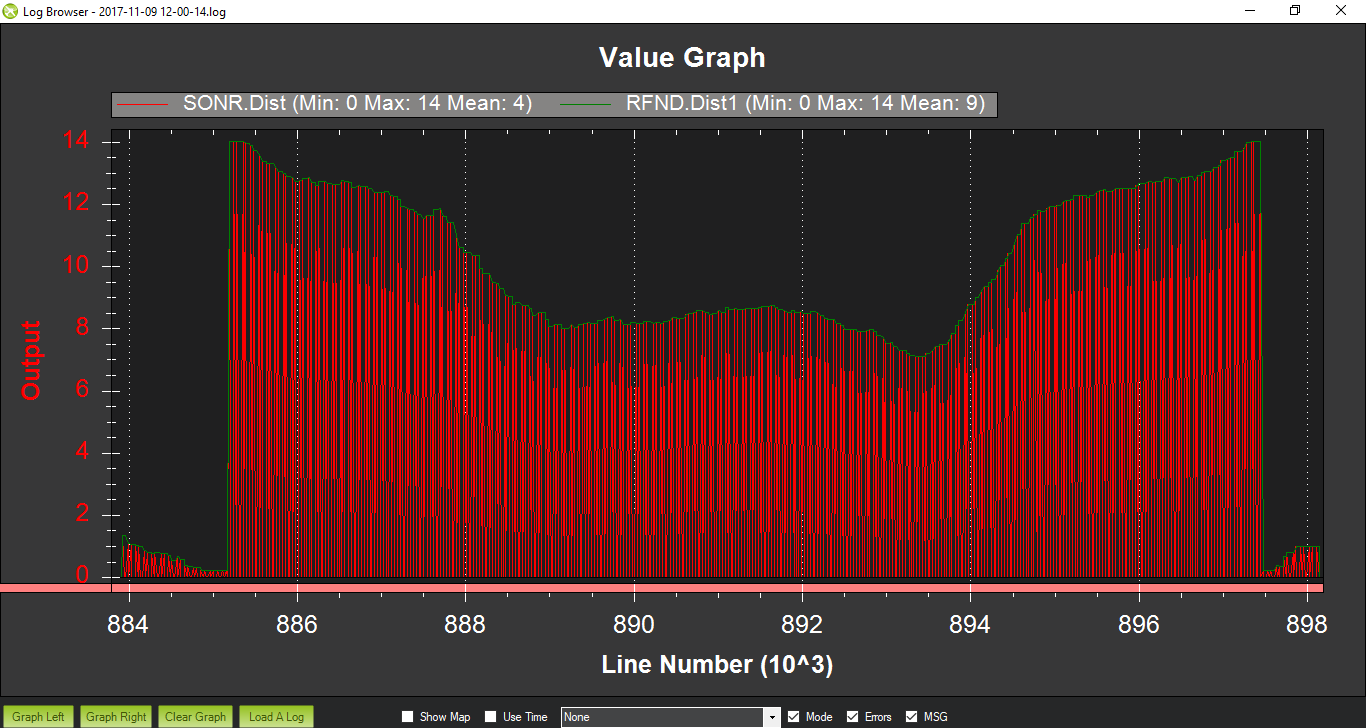
I set up the rangefinder by this manual and i’m getting good measurements, but if I set up RNGFND_LANDING = 1 it cause Bad Lidar Health error.
How this can affect the accuracy of landing?
Is this differences in values of SONR.Dist normal?
I set up the rangefinder by this manual and i’m getting good measurements, but if I set up RNGFND_LANDING = 1 it cause Bad Lidar Health error.
How this can affect the accuracy of landing?
Is this differences in values of SONR.Dist normal?
I don’t have too much experience with Plane (only Copter) but most of the time when I saw such behaviour on RangeFinder message it was due to wiring problems (usually some discontinuity). Other time it was when part of the frame was within sensor field of view.
If you have USB adapter can you check the sensor readings using GUI tool (http://teraranger.com/wp-content/uploads/TeraRangerHubControlerInstaller.rar) just to rule out sensor issues?
If you find it’s OK when using USB adapter I would try to plot the data i real time and try to wiggle the i2c wires slightly to see if it’s getting better.
I think i have find the problem. It is in the code.
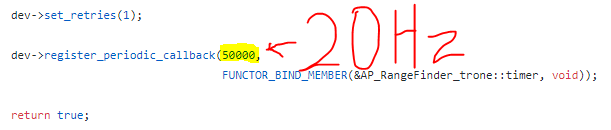
The frequency of getting data from rangefinder is 50 hz

And every time we clean data, that we have collecting.
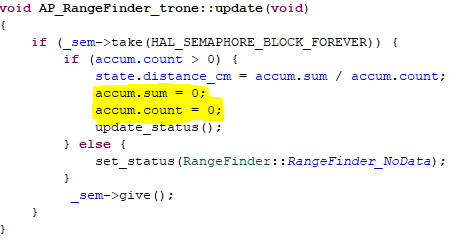
BUT we update our data from the library of TeraRanger with frequency = 20 Hz. It cause that 2/3 of the updating from main thread returns zero. And it cause that the improvement of auto landing doesn’t work.
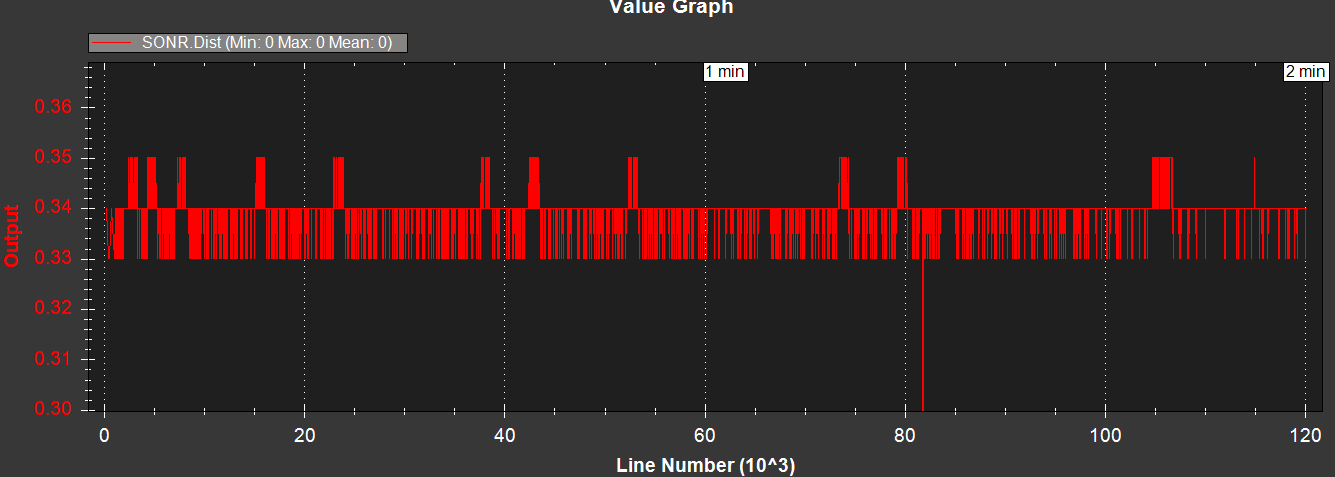
So, i changed the library code to this
And i have the next log
Hello, I have the same problem (logical). Do you know if your modification was included in the next ardupilot releases?
If there is any way to get the modified code, it would be great (I could try to do it myself but althoug I can program, I never tried to go into the ways of modifying anything in arduplane. Any advice would realy help.
Best regards
Christophe Hentsch, Switzerland
As I know, it doesn’t includes in release. All modifications that you need I have show before. You need the compiled firmware? I can do it later if you need.
Hello,
Many thanks for your answer. I would be extremely gratefull to test a
compiled firmware. I tried to get the best possible info on my platform:
PX4v2 004A0034 3135510D 35333436
PX4: 1e7ed30b NuttX: 1472b16c
ArduPlane V3.9.0 (9cc02ae1)
(We have a minimal understanding of C and Arduino but would need many
hours to learn how to get and compile all the libraries)
We have good fun with gliders
https://www.youtube.com/watch?v=3T6svclmhb0 and we work hard to get a
precise landing.
The terra ranger one was the best hope for the landing.
Best regards and many thanks in advance
Hi,
Here is the firmware https://drive.google.com/open?id=1Ct7Sii37OIsYF1rPbJd9jg7R9AM1tRw9
Check it please before fly(!!!). You can send to me logs if everything is ok.
For now I don’t have TerraRanger, so keep me informed.
many many thanks !!! I will test and come back.
Best regards
Christophe
Hello @MnimiyUmnik, I just wanted to say thankyou for posting the solution to this problem because we have been struggling with the same problem with a Teraranger EVO 60 , which produced many zeros values along with correct distance measurements. I have created an issue in the Ardupilot repository
and a developer confirmed this issue and they are going to fix it.
Thankyou!
Adolfo.
Thank you for a great work)