I am getting involved with cold weather Search and Rescue with drones and now have a need to monitor battery temperature. I have scanned threads for two days and I’ve yet to see something straight forward. I see on the HUD (user items list) a variable labeled Battery_temp, but no where in the plane wiki, or in the parameters list in that wiki does it tell me how to enable an external temperature sensor other than using an external barometer. If that is the only way to get telemetry for an external temperature (I’ll stick that barometer in the battery if I have to) then I need to know for sure that it is the only current option.
Please note:
I am not willing to use the Pixhawk 2.1’s onboard barometer temp as it is not battery temperature.
I’m also not currently looking to sense ambient temperature as it is also not battery temperature.
What I need is:
A link to a device to buy that I can attach/insert into my battery pack that will connect to the I2C board for the Pixhawk 2.1
A write up/guide on how to set the parameters from within Mission Planner
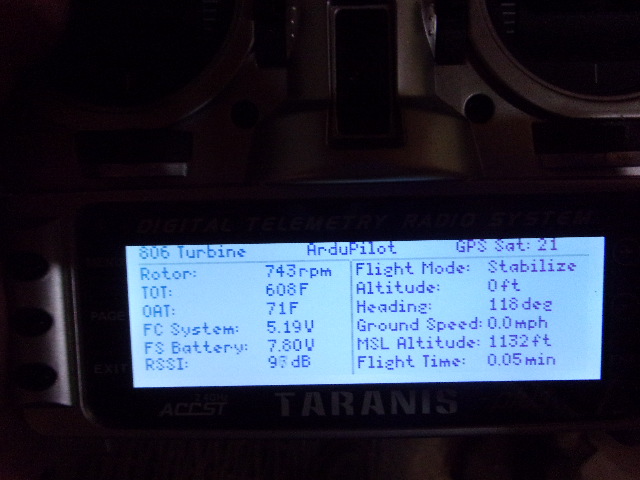
I use that sensor on piston helicopters with the rpm hooked to the magneto primary and the temp sensors for engine temp and OAT. It does not work with Mission Planner directly but it does work with FrSky telemetry and the temp sensors can be used to sense temperature of anything you want to attach the sensor to. The temp sensors are thermistors. I have several custom Lua Scripts I have written for helicopters that displays combined FrSky sensor telemetry with ArduPilot telemetry using a C&T telemetry cable hooked to the SmartPort on the receiver. Since the script is open source it could be modified for anything. This is the one that uses the SP-RPM sensor
I don’t know of any external temp sensors that work with ArduPilot at this time, but that doesn’t mean there isn’t any. Just that I don’t know about them if there is.
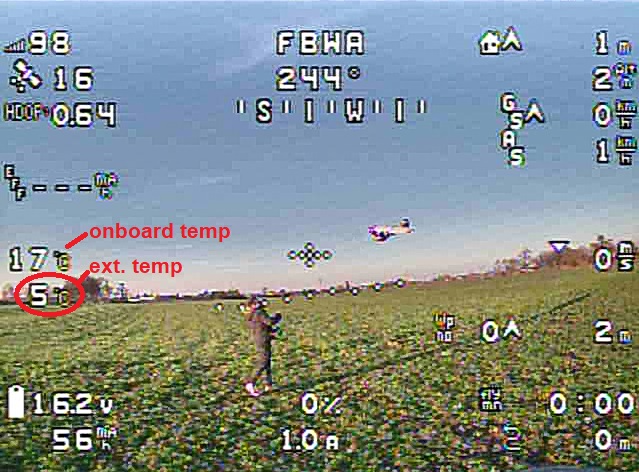
This is an example of what the script shows on the RC screen, in this case with one of the sensors replaced with a thermocouple for the EGT on a turbine engine, with the engine running at flight idle power on the ground:
There is some things where RC telemetry is better than MavLink, as RC telemetry is virtually real-time and there is latency in MavLink packets with modem radios. So I consider RC telemetry to be a useful tool to use along with the ground station. The RC can display some things the ground stations cannot.
i’m using additional I2C BMP280 type barometers for external temperature sensing on my setups. those boards are affordable and pretty easy to source.
current chibios code allows probing for additional baros on external I2C using default firmware, providing full ardupilot / MP telemetry integration.
GND_ parameters allow to set what bus to probe on, what hardware type to probe for and which barometer instance to use as primary for alt control.
the additional baro’s reading is logged and integrated into mavlink telemetry:
Hello.
I’m trying to output the temperature readings with the barometer, but I’m stuck.
The problem is that my autopilot already has two barometers and the external one is displayed by the third one. In the mavlink inspector, I can see the indicators from it, but I cannot display them on the main screens of the mission planner. Maybe someone knows how to help me?
I can tell you that putting chemical hand warmers around your battery is not a solution as it can’t produce enough heat while in flight to keep the batteries warm.
I did come across a battery heater system but I can’t remember anything about it other than I had attempted to design such a system but gave up because I couldn’t figure out how to get it to report temperatures.