Hi dear Ardupilot community,
I’m trying to connect my computer directly to a Rasberry Pi 3 B which is connected to a Pixhawk 4
I need the Rasberry Pi to compute complex behaviours like clustering, object avoidance, and missions autonomously.
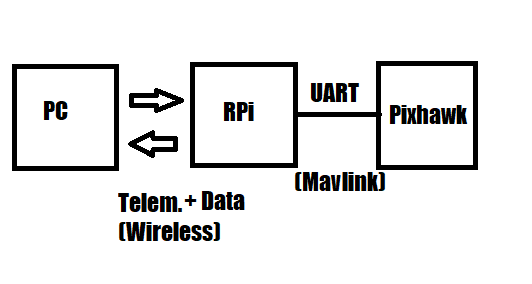
The general idea is to connect my computer over the WiFi ap on the Pi and (if possible!) access the cli on the RPi (like I would when ssh-ing into it) such that I could upload and run a python script on it. After having done that, the RPi should be able to do it’s mission even without connection to the main computer. The python script will communicate with the pixhawk over mavlink.
Is such a thing possible? Right now I’m able to connect to the RPi using it as a Wifi hotspot but I’m unable to actually enter the OS on it. How would I do that?
Any help would be appreciated. Here’s a diagram of what I want to achieve.
" Telemetry over Rasberry Pi for Mission planning"
==> Yes
But … … for other features such as object avoidance, it needs specified sensors or modules, especially autonomously navigation:
There are a few demos for you to consult (I’m quite sure Pi3B is not enough for autonomously navigation, which might be the topic you are refering “compute complex behaviours like clustering, object avoidance, and missions autonomously”)
Thank you very much for the quick answer and the resources and advice I appreciate it.
Just one more thing, that is unclear how do I ssh into the Rasberry Pi when I connect to it directly as an Acces Point (over the on board wifi).
The Pi must be on the same network as the client computer. Then you simply access remotely as usual. If the access point is onboard, then the client PC must be able to connect to that access point.