@tridge Thank you for the community towards the wonderful work.
here i need help from experts that tuning and suggestion on the VTOL plane especially TECS part.
Used airframe is LOONG VTOL 4+1 configuration on CUAV v5+ Arduplane 4.1.7.
Yesterday i had a flight from takeoff to landing full auto and transition was perfect in both ways and I’m really happy for the performance. But i have 2 issue which make worry me
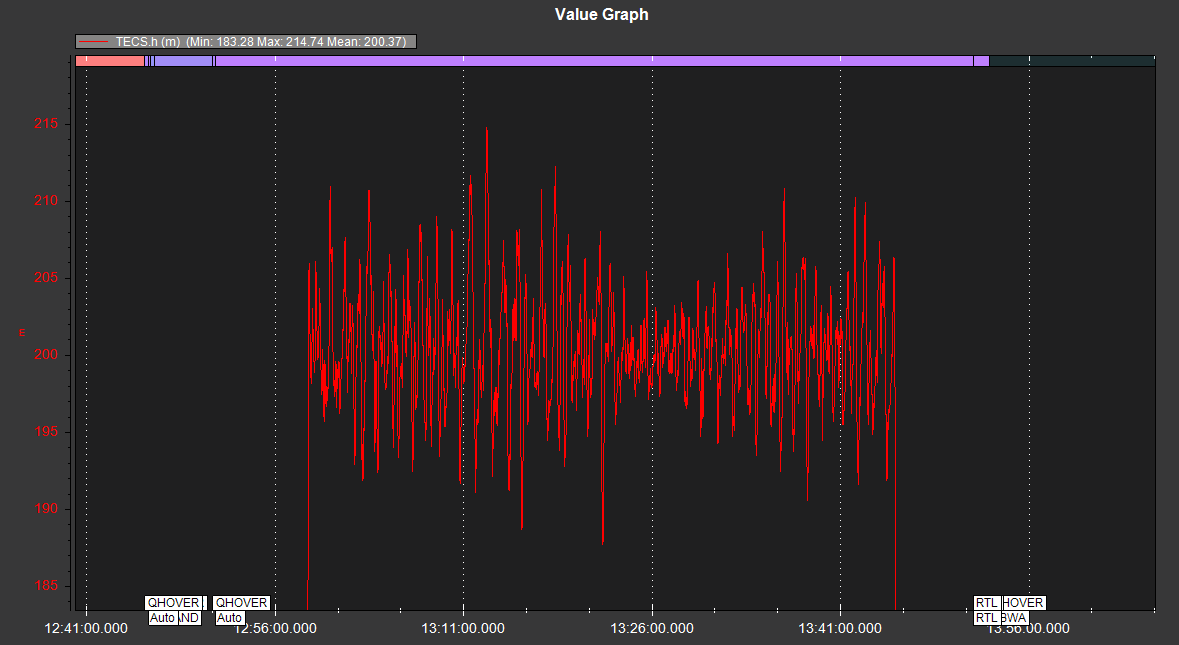
1. during Loitering my plane was not maintain its original altitude. it keep increase or decrease about 5-10m i was tried to tune the TECS Time Const parameter to maintain the altitude ,but it doesn’t help.
what parameter will help to achieve the good height hold.
These height changes due to head wind and tail wind pattern because it loitering?
- i have set following TECS parameters as like :
Climb Max = 3
Sink Min = 3
Sink Max = 4
Pitch Dampening = 0
Time Const = 4.5
also attaching parameter file here for your reference
Pixhawk loong VTOL.param (20.9 KB)
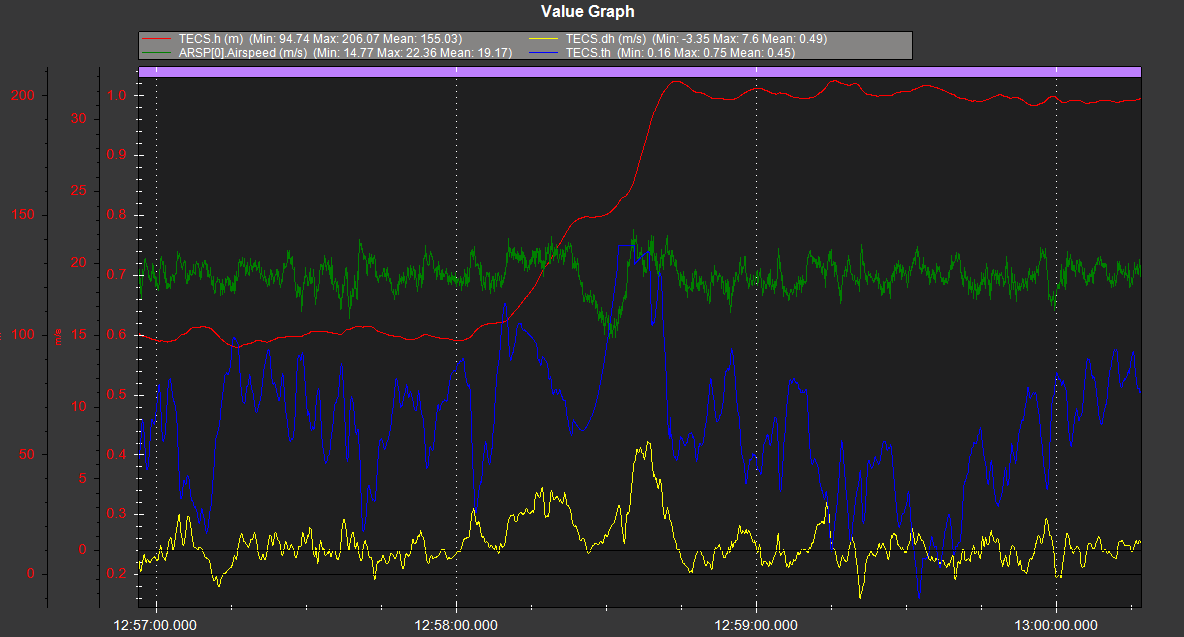
when i try to climb the airplane from 100m to 200 m the plane climb vertical velocity was reached up to 8m/s with desired airspeed(19m/s) and throttle set max value 75.
The TECS Climb max parameter set to 3m/s as maximum value, how the plane could achieved 8m/s vertical velocity.
May TECS_VERT_ACC affect this because this parameter default value is 7 m/s.

i am attaching bin file also for the reference:CUAV V5+ VTOL LOONG - Google Drive
kindly i need help from the experts to solve this issue .