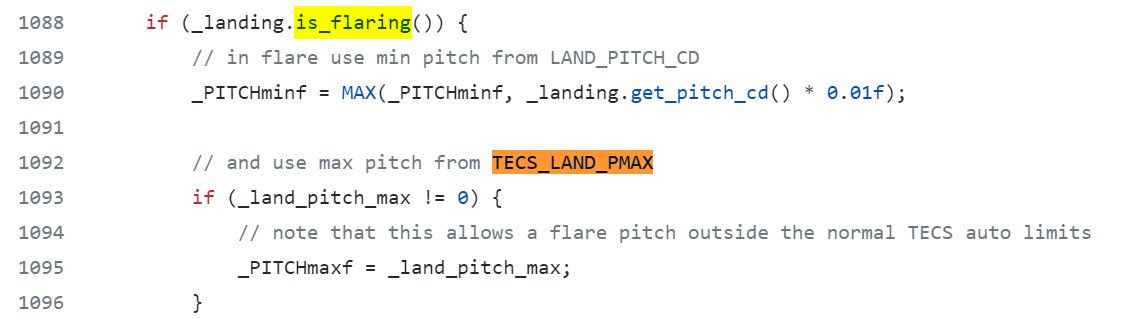
Hello everyone, I have a question regarding the tecs_land_pmax parameter “Maximum pitch during final stage of landing”. As seen in the screenshot, it is configured to limit the pitch to 6 degrees during landing (before flare), however in this landing, arduplane is demanding much more than those 6 degrees (up from 14 degrees). Plane stalled and crashed before flare (thankfully only minor damage), tecs_land_spdwgt is set to 0.1 which probably contributed to the stall by not prioritizing speed, but if the plane had respected the 6 degree limit probably not. Is this behavior correct? If necessary I can share the log. I’m using Arduplane 4.0.9 on that airplane. Thanks in advance!