Hello all. I’m new to the Arducopter world. Built myself a Tarot Ironman 650 quadcopter with a Pixhawk PX4 V2 and Copter 3.5.5, Multistar elite 4006 740KV motors, and 1355 props. Powering this with a 3S 10,000MaH battery. Had it in the air a few time, and it flies. I ran autotune yesterday, and seems better but still not right. I’m attaching the autotune flight log with hopes someone here can take a look at it make some sense of it. Thanks in advance. https://www.dropbox.com/sh/spk38bjn58eojca/AADaMG8je4zoQiYEP_jmgIFLa?dl=0
Yes, your tuning is much better than when you started but still a bit reactive.
You have not set the ATC_RAT_RLL_FILT nor the ATC_RAT_PIT_FILT to 10
That would help.
And maybe reduce your AUTOTUNE_AGGR a bit more.
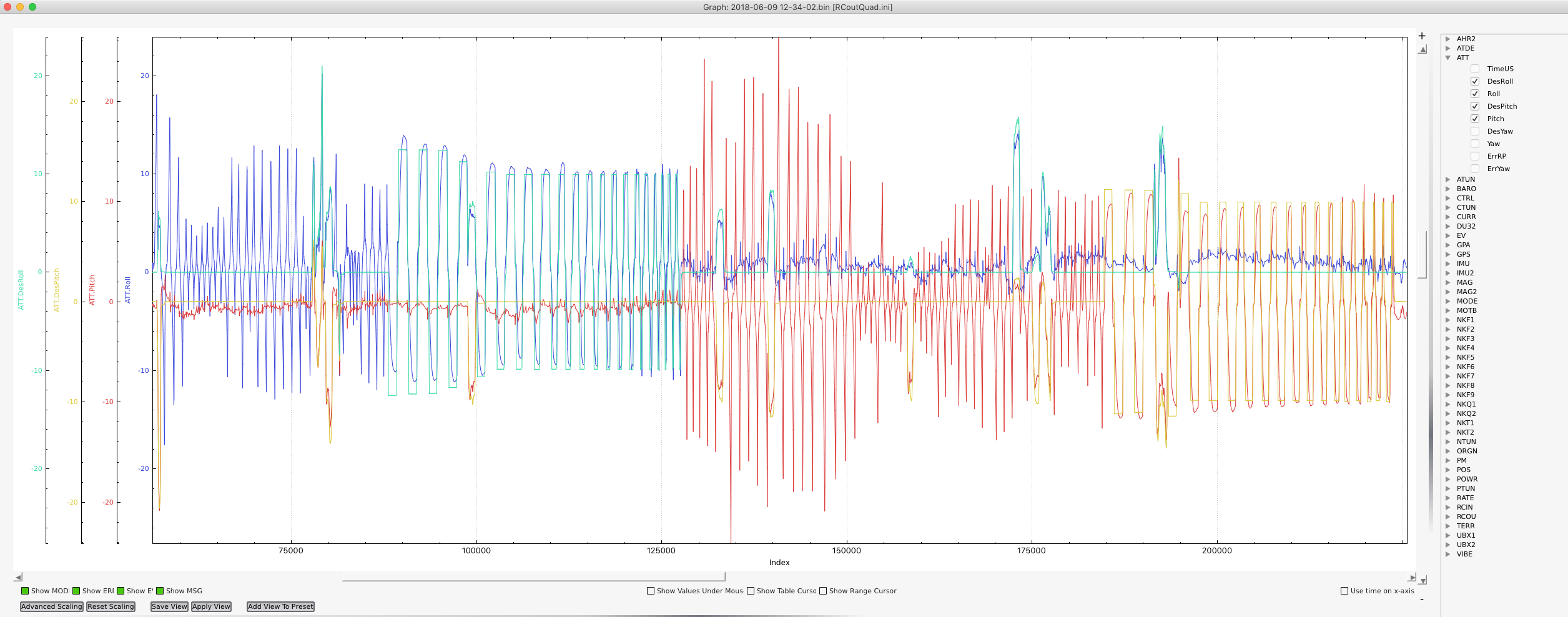
Roll and pitch were pretty unstable when you began.
Another autotune or 2 should get under control and feeling better.
Thanks for all of your help. Anything else in the log I should be aware of? Quadcopter does fly much better after auto tune. Now just need to figure out why compass isn’t working correctly all the time.
A couple of hints:
- Some where along the line you may want to go with longer props and lower Kv motors to get the better flight times.
- You can increase the motor center to motor center distance by swapping out the stock motor mounts with the Black Motor Mounts from a Tarot 680 Pro. You should be able to use 16" and perhaps 17" props. Don’t use the RED mounts. For some reason the Red plastic is not as “hard” as the Black so its real easy to pull the threaded inserts out. I’m currently running a 650 Sport that I stretched slightly by using arms from a Pro. I’m running 5010-350 Kv motors swinging 1655 CF props on a 10000mAh 6S 10C LiPo. The All Up Weight is 3315 grams. Hover time is in the 25 minute range.
Describe the problems you are having with the compass…
I might in the future look in to lower Kv motors and bigger props, and maybe a 4S battery. Problem with compass is EKF variance, which leads to toilet bowling in GPS modes. After spending a lot time researching the problem online, willing to bet I need to change compass roll_270 to roll_180. That, along with what mboland suggested. That is my plan when I get home this weekend.
I’m having trouble finding a Pixhawk PX4 V2. Can you post a link to what you bought?
FWIW, a standard Pixhawk (both the 2.4.6 and the 2.4.8) use NONE for the external compass orientation. It used to be Roll180, but since a standard GPS/Compass module has the compass inverted, to take that into account and simplify Initial Setup, the code was changed.
For the battery thing, I looked at your log and you have some serious voltage sag, and NO current is being logged. Looking at the parameters I see you have the FS_BATT_VOLTAGE parameter set to 6. For a 3S battery that should be set to 10.5 volts(3.5 volts per cell). You have BATT_MONITOR set to 3 (Analog Voltage Only). This should be set to 4 (Analog Voltage and Current) The BATT_AMP_PERVLT parameter looks like it is on the high side. Mine run in the mid 20’s and yours is almost 40…
What are you using as a battery monitor?
This is what I have, mounted in a plastic case on top of the canopy. At the moment, don’t have any battery monitors set up. Having issues getting the power module to read right. Thinking it might be a cheap knock off issue. Will look in to that more this weekend, along with everything else. I have battery voltage on my Q X7 Flightdeck screen, and land when it reads 10.8. When charging the battery, put back around 6000Mah. Little bit more of a learning curve with Pixhawk and Arducopter than Omnibus F4 boards and Betaflight and Inav. Will admit, after first few flights, does feel a little under powered. Going to look for a 4S battery, as don’t think a 3S could lift a gimbal and Gopro.
ETA: Got the Pixhawk off of Ebay. If.your user name is the same elsewhere, you have seen the link to the kit I ordered.
I run Flight deck too! I’ve had it on my X9E forever and I love it.
If the Pixhawk case is all black you have a 2.4.6. if the edge of the case is grey, you have a 2.4.8. I have two .6s and one .8.
For the battery monitor, you need to calibrate it but to do that you need to get the current data input squared away. The pin outs are standard, but I have seen more than one 6 wire cable that was made up wrong. The easy way to tell is to lay the cable out flat. One end should have the connector locking tabs facing up and the other end should have the connector locking tabs facing down…
Once you get current data being logged you can calibrate the current sensor and its pretty easy.
Basically you take a 5 minute flight with a fresh battery, land, disarm, and unplug the battery and put it on the charger. No need to balance charge, just use a normal charge.
While the battery is charging, download and review the last flight log.
In the log browser, expand the CURR branch and put at check in the box next to CurTot. The browser will plot Total Current. Right click in the plot pane and select ‘Show Point Values’. Hover the mouse cursor over the right end of the plot. You will see 2 numbers in parentheses separated by a ‘,’ like this: (252676, 4405.5) . The first number is the line number in the log file. The second number is current in mAh. Record that number as Logged mAh.
Next you need to find the Amps per volt number. Connect the Pixhawk to your computer launch Mission Planner and navigate to Initial Setup > Optional Hardware > Battery Monitor > Item 6. Record this as Old Amps per volt.
When the battery is charged, record the amps charged as Charged mAh.
Now you can plug those numbers into the attached spreadsheet…Power Monitor Calibrator.zip (6.2 KB) and it will calculate a new Amps per volt number. To change the number, click in the box and press the DEL key. When the box is blank, type in the new number and then click on any other box. This will save the new Amps per volt number. At this point you can make additional flights and tweak as necessary.
After a couple of iterations you should be able to get the logged and charged numbers to within 200mAh.
There are some important upsides to getting the PM calibrated, most note able is having a functional low battery failsafe, but an added bonus is you can use the logged voltage and current to calculate the grams per watt efficiency of the power system (motors/props/battery), and from that we can calculate flight times (I have a spread sheet for that too…).
Yeah, I know you run Flightdeck also. On my laptop, i have bookmarks to your posts about PM calibration and flight time worksheet. Only had this in the air 3 times, and is a work in progress. Biggest problem is I work out of state Monday thru Thursday. Don’t leave much time on the weekend for building, flying, crashing, and rebuilding my quadcopters. Oh, and Ebay links claims it was a 2.4.8. If I can’t get everything ironed out soon on it, will pull the trigger on the Holybro PX4 V4 that was recently released.
Set ATC_RAT_RLL_FILT and ATC_RAT_PIT_FILT to 10, set autotune to .6, and set compass to none. Ran autotune a second time. Happy to report quad flies great. Nice and steady in GPS modes, and no more EKF compass variances.
1 Like