Now the AUW is going up to 3.5Kg and my flight time is expected to decrease to 13~15min.
I’d like to increase the flight time to 35~40min.
Do you guys think I can reach this flight time with this frame, changing set of motor/props/battery? Or should I change also the frame?
Could anyone share some setups or recommend a set motor/prop that I get flight endurance like that?
Did you think to double motors on dodeca configuration? I understood ArduPilot has that feature,
Me I have the same Tarot 680 hexa and think to keep the hexa configuration and adding another 4 (not 6) motors on positions 3, 4, 5, 6, using a Y cable for ESC and keep 1 and 2 as single motor for being able to do yaw.
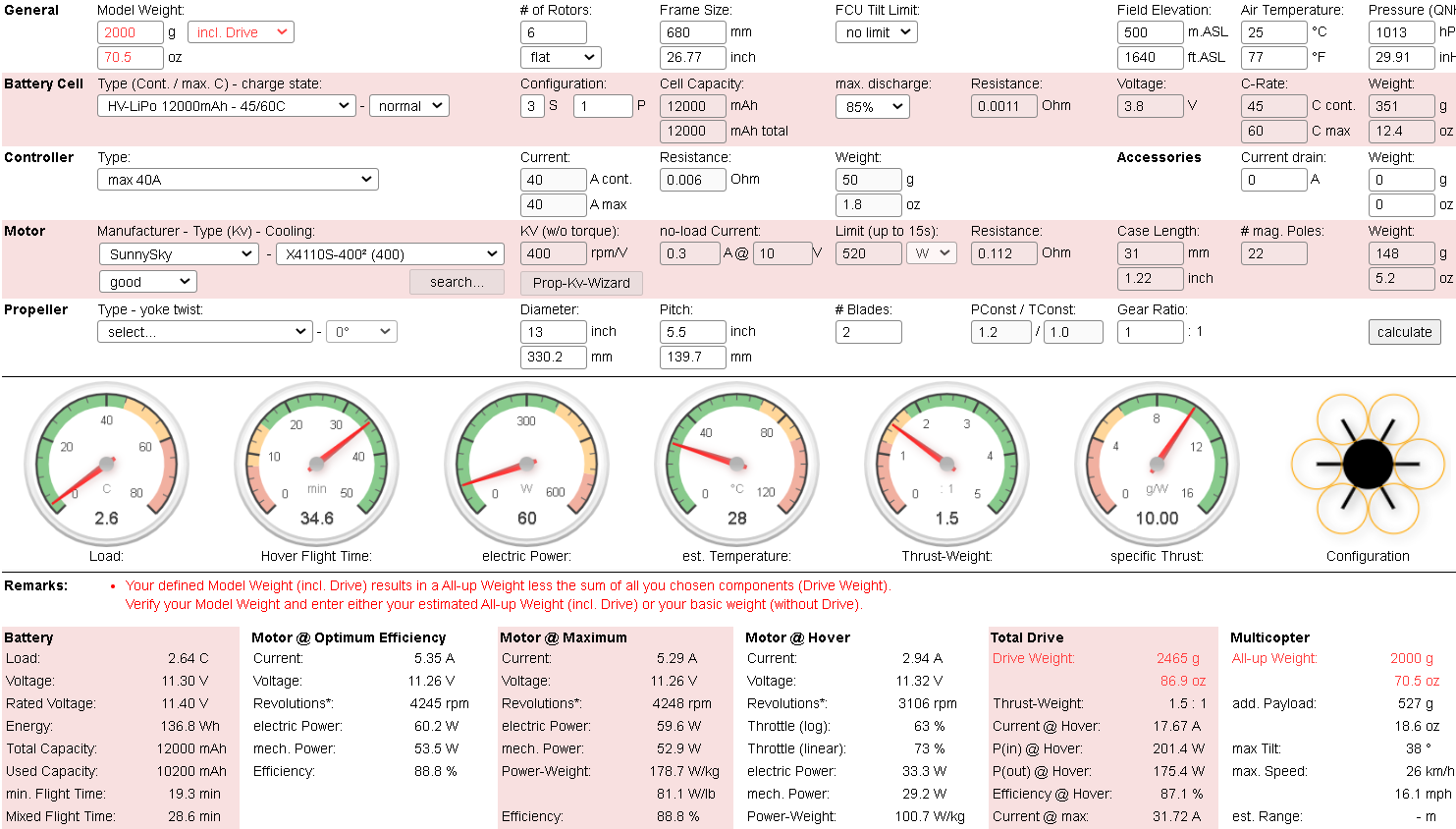
What is your MOT_THST_HOVER value at 2Kg? This value is a good sanity check for what eCalc predicts. If Ecalc is in the ball park then add 1300g more in battery weight/capacity. That’s what I see in eCalc anyway.
Well, of curse that changes things dramatically. Perhaps you should have built for 6S power. Now you only have ~400g of extra battery to add which is not significant. You will have to be happy with your well performing craft for ~14 minutes.
Yes, I am considering switch to 6S, but in this case which motor size would be most efficient?
So what about the propellers, keep at 13 "or bigger? If bigger, would I need to change the frame? Keep Hexa or build a Quad?
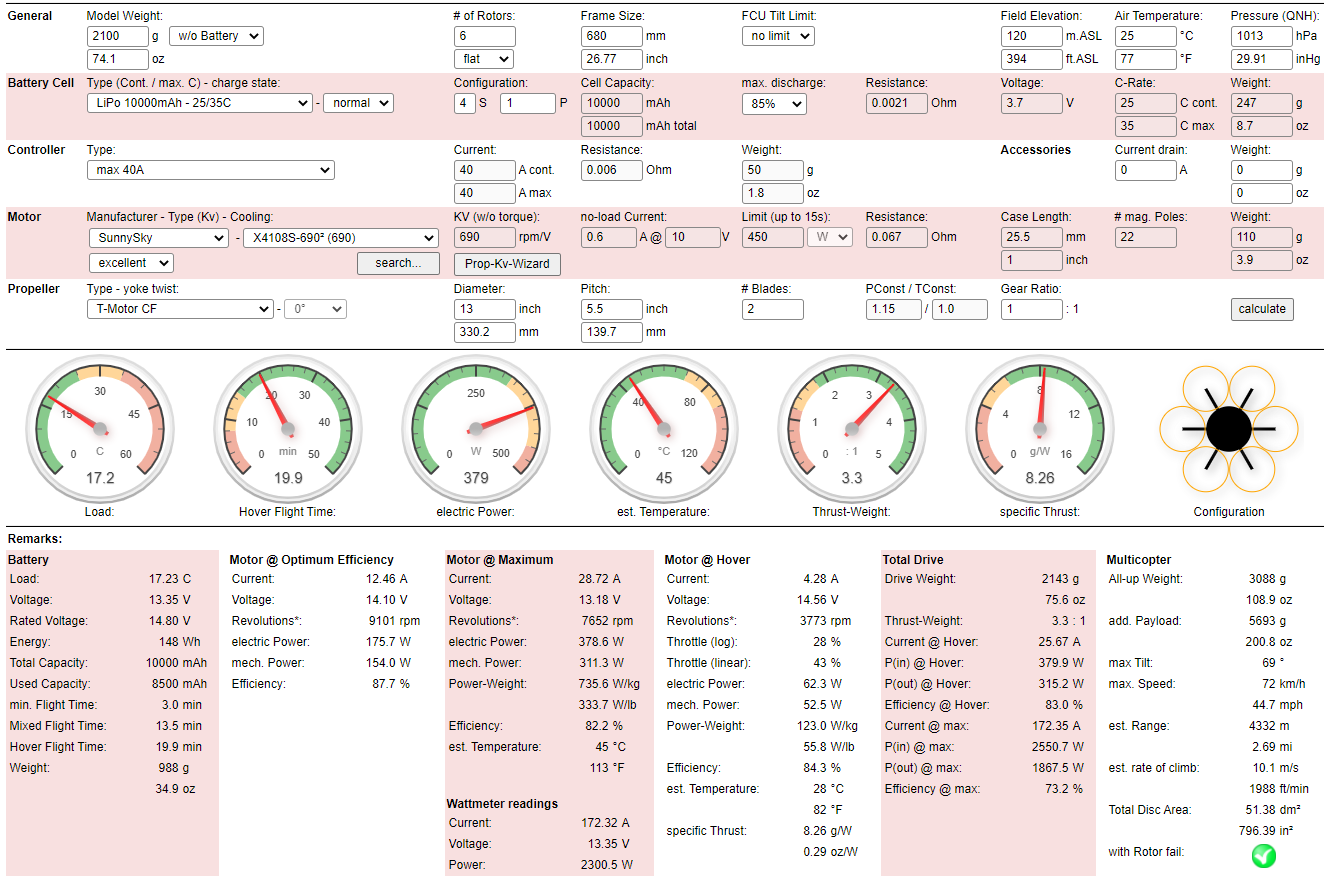
Let’s consider if you extended the arms to allow for 15" props, used the 380kV version of that motor and used a 6S 10,000mah battery. Take Off Weight would go to ~4100g and flight time would only increase a few minutes. So not worth doing obviously. That’s essentially what this guy did: http://wrong17.com/tarot-680pro-hexacopter-the-build
For 35min with around a 600g payload - I would recommend the tarot T960 Hexacopter.
The first setup they have listed is what I have been using in my past builds (but with BLHeli ESCs and XOAR propellers). Paired w/ a 6s 22Ah battery - I can see a flight time of around 40min w/o payload load.
Lots of good discussion on motor sizing, battery, ESC selection, etc. I’ll take a step back to point out that the primary factor driving power consumption is the rotor size. The larger the rotor, the slower it has to spin, and the less power required. This goes back to induced power, P_i = T*v_i, where T is thrust and v_i the induced velocity at the rotor disc. v_i decreases as the rotor size increase. Of course, you may need to change ESC and motor selection with a change in rotor size.
For flight at higher advance ratios, there is going to be an optimal / minimal flight speed when considering induced, profile, and parasitic power. Finding this operating point may help you meet your endurance goal. See this article for a quick introduction on power: http://www.griffin-helicopters.co.uk/note/helicopterpower.htm
Run the numbers with high-end Li-ion cells like NCR 18650GAs. You’re drawing roughly 30A at max so you can do 6S and 4-5P and have margin to spare. Moving from LiPo to Li-ion will typically give you 40% more flight time.