A while ago, I added a 6-position switch to my X9D (OpenTX 2.3.5) and set it up as S3. On the radio itself, I’ve selected S3_1 to S3_6 to select the OpenTX flight modes and named them in the same order I have selected on the flight controller (I know this is not needed to change the actual flight mode, but I wanted it to be like that).
Now I want the same switch to select flight modes on my ArduCopter Multicopter (Pixhawk with S-BUS R-XSR receiver). I’ve mapped S3 to channel 5, which seems to be default for flight mode selection on Copter. But the PWM ranges between switch steps do not “fit”. I’m not sure which way I should choose to correct this. With OpenTX and some logical switches or with a curve? Or even change something on the flight controller?
I’m looking for the “recommended” or least complicated way to do this.
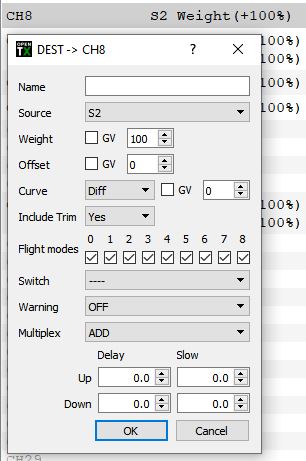
If the S3 6-pos switch works like an S2 pot this is all you should have to do. It’s set up on Chan 8 and I don’t have S3 but the same thing should work. It works fine on my Taranis by rotating the S2 pot thru it’s range and the Flight Modes are selected within their ranges.
With default settings, the first position equals to S3_1, but the second position already jumps over S3_2 to S3_3. This may depend on the hardware (switch) used.
OK, got it! Like you I’m always looking for the simplest solution and you have probably found it for this switch. I was messing around in Betaflight the other day and am impressed with the way they have configurable ranges for mode switching. Gives a lot of flexibility.
As it happens, I was just looking for the possibility to adjust the range for a 3-position switch in ArduCopter. But it seems this is better solved on the radio, not on the FC.
I’m sure that ArduCopter is very sophisticated in its core functionality. But the configuration is sometimes really complicated.