Hi Friends,
Although I am new to the Rover side of the Firmware I have been flying Ardupilot with Mission Planner for a few years. I first learned to fly heli’s. My first flight controller was a Rabbit, the second was a Crius AIOP V2 running Megapirate, then APM and then Pixhawk.
I am crawling out of severe brain fog from a year and a half in and out of the hospital and haven’t been able to fly. At 74 it has kicked my butt, but I’m on my way up. I said that because I want you to know I’m not a beginner or an idiot.
So I’m trying to do something I have never done before to get the brain cells back where their supposed to be. I have put together a pixhawk lite and almost all the needed parts for my rover from my parts bin. I have a chassis. The problem seems to be the radio, I’m just slow getting it back together.
I have a Taranis Plus I have been flying Planes and Multi’s. I love it. My receiver is an X8R. I want to have the throttle and the rudder/steering mixed to the elevator and the ailerons and a 2 axis gimble on the left stick. Mode 2
I have tried for about a week and it’s just not happening. I of course have read the docs and watched the videos. I feel like I need to be kick started. If someone could point me in the right direction it would be much appreciated.
Thanks
Jerry
This should do the trick Jerry assuming it’s not a skid steer Rover:
SERVO1_FUNCTION (26)
SERVO3_FUNCTION (70)
SERVO4_FUNCTION (53)
SERVO5_FUNCTION (54)
Steering servo on output 1
Throttle (ESC) on output 3
Manual gimbal pitch on Output 4
Manual gimbal pan on Output 5
Thanks, I’ll check it out tomorrow.
Jerry
Thanks for the reply Dave
I got sidetracked by another Kidney Stone Surgery. How time flys when your having fun.
Anyway, Im back in an upright position.
I have changed my mind about what I want to do. I like the throttle setup from Painless360 with the throttle on the left and reverse on the SA switch. I have that working and I like it. I have the front Steering servo hooked up to channel 1 and that works fine. The rear wheel servo is not hooked up. It’s the 4 wheel steering that has me going now. I can get the switches I need setup.
There are 2 eepe files attached, The Rover1 file is how I would like things to be for the steering. But I can’t seem to make it happen.
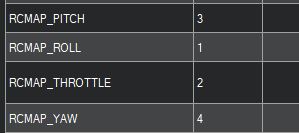
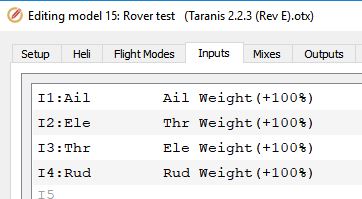
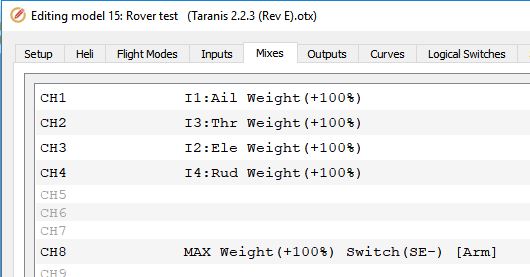
The rover model in the 7-24-19 file is the one I have in my radio that I’m trying to get to work. The RCMaping in the parameter list is AETR which is how the input and mixer setting have them listed. BUT, something is screwed up in the channel mapping because the Throttle will only work on channel 2. I would appreciate your thoughts.
Thanks
Jerry
OOps, I see that eepe files are not good. How would I get by that.
Zip the files and supply a parameter file from Mission Planner also.
You have SERVO2_FUNCTION set to 70 (throttle). So no surprise throttle is working on channel 2. maybe you are confusing inputs with outputs.
Thanks Dave,
I hadn’t thought about the servos, I don’t know how they got set. I must have made some wrong choices somewhere. I changed things so many times trying to get everything working. I think I got everything working now, even the 4 wheel steering. My only big 2S battery died as I was finishing. So I’ll double check later.
Thanks again for the help.
Jerry