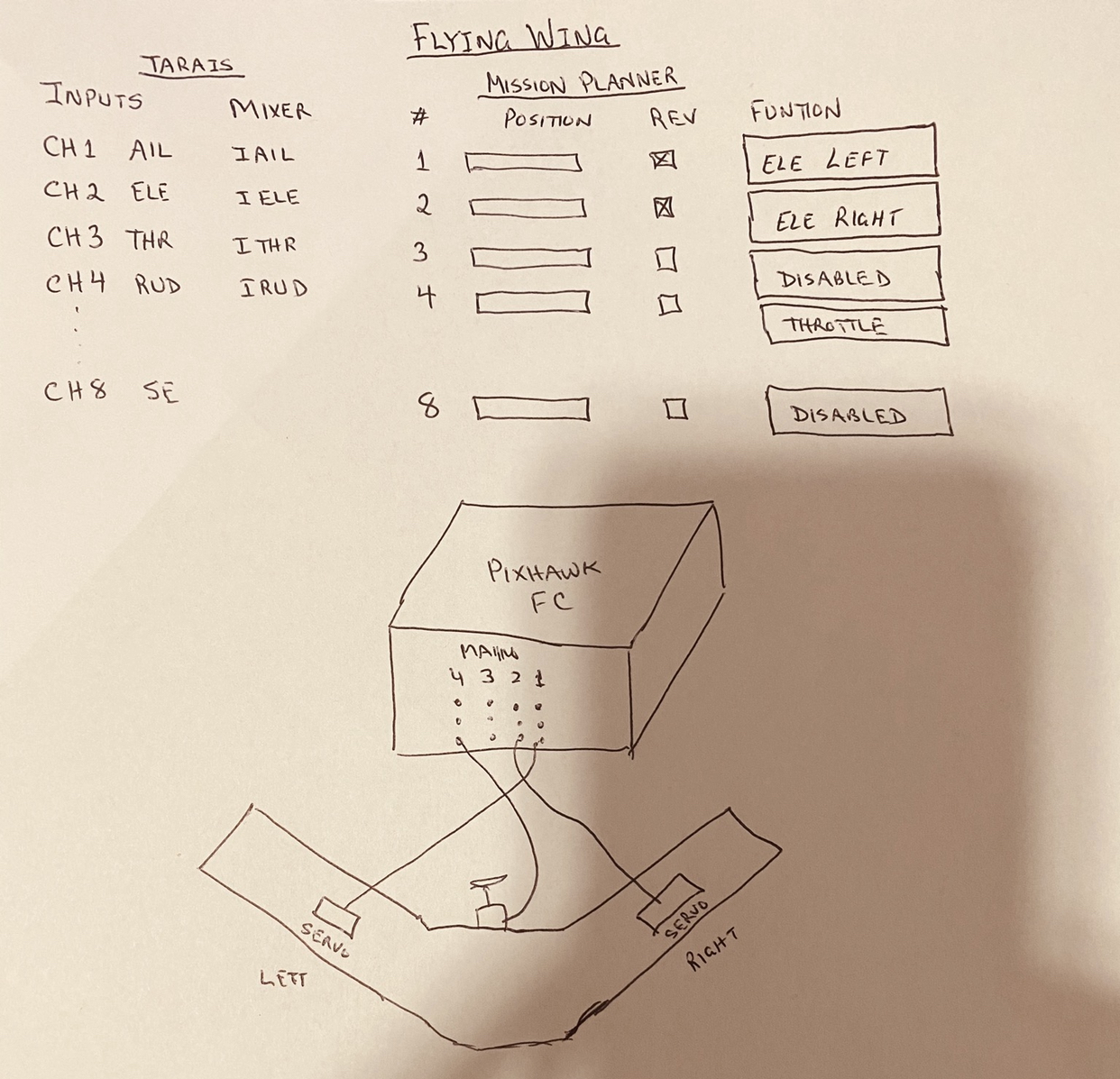
The above diagram and setup works, however a number of things are very confusing.
Main-out Pin 1 has left servo connected to it.
Main-out Pin 2 has right servo connected to it.
Main-out Pin 4 has ESC for thrust motor.
No matter what you do, if I want Thrust motor to be connected to main Out -3, FC will not allow you to do that. Is it hard coded in the Plane firmware that one must use main Out 4?
What also confuses me is the servo output section inside mission planner.
How it correlates to what you set inside Taranis radio inputs and Mixer? “Or” the servo out section in MP is actually a mixer itself and you don’t need to do any mixing inside the Taranis radio?
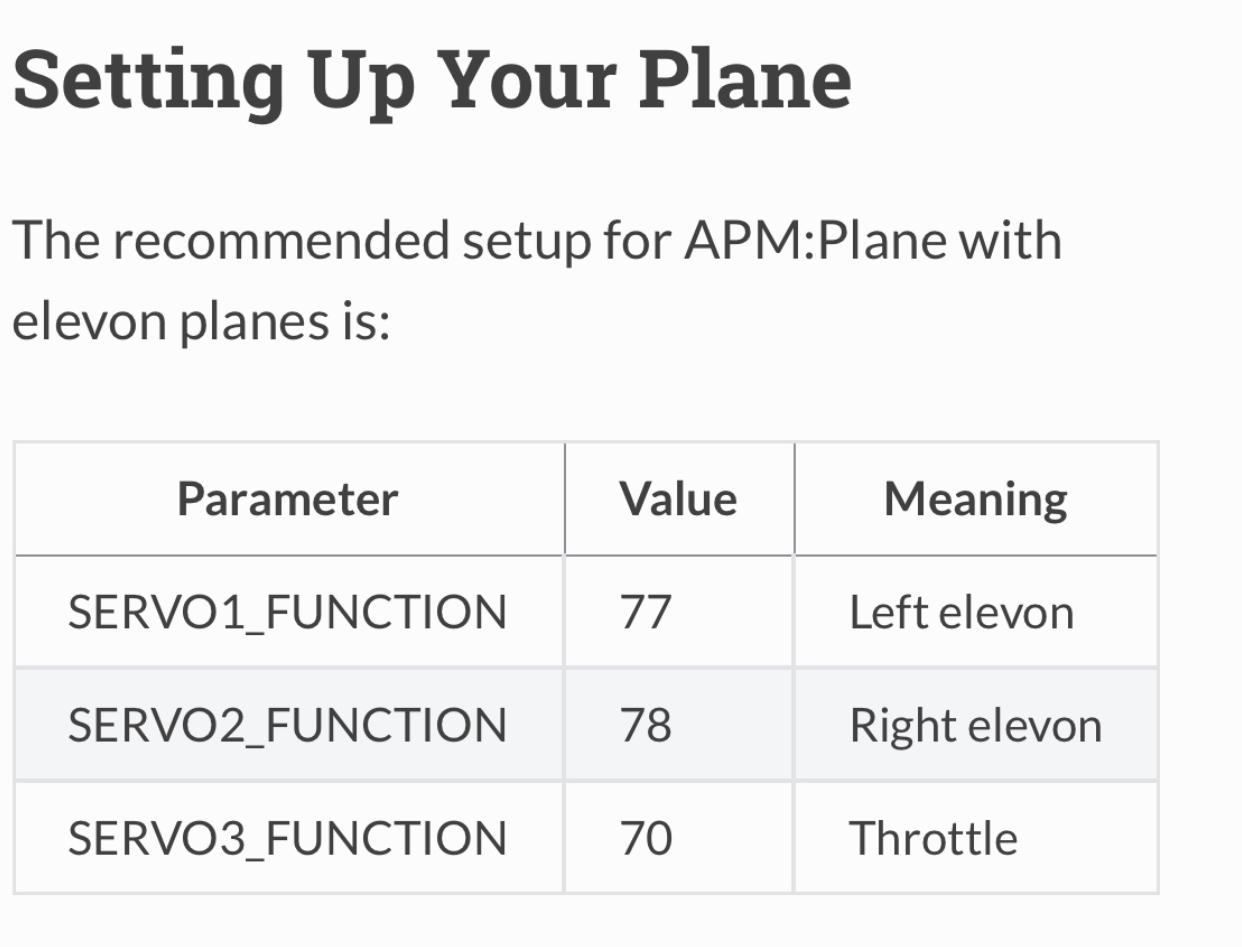
if that is the case why in Ardupilot documentation is says, for wing plane you must use Pins 1,2, 4 and set;
I have never done anything with the plane firmware, but it seems odd that servo4 would be hard coded for throttle, especially since inside MP it allows you to change it.
First you have this: Outputs are provided to activate servos, motors, relays, etc. to control the vehicle. Any autopilot output can be assigned the desired vehicle control output function via the SERVOx_FUNCTION parameters
As Marc said any output can be used for the motor if it’s assigned as such (70). Does the throttle chan move in the Radio Calibration screen? Armed and Safety button pressed (parameter file shows it enabled) before attempting to run the motor?
Great! Changing servo parameters requires a restart of the FC perhaps that was it? Anyway, on your way. Are really using AP3.6 or did this just land in the wrong thread?
Good job. Beat me to it. With these things you do have to walk away sometimes.
Ardupilot is a steeper learning curve but it is by far the most powerful open source autopilot.
I would spend a little time on OpenTx as well. That is extraordinarily powerful. Any input can be assigned to any output. In fact Yaapu (Alex) is pretty close to a LUA GCS on an OpenTx radio now that he has bi-directional telemetry from his LUA scripting working.
 One to One relationship no mixing.
One to One relationship no mixing.