Adrian,
Copter 3.5.4 was just released! This has the scaling correction for dual heli. Let me know how your testing goes.
Bill
Bill,
Saw the announcement yesterday. I will upgrade over the weekend and re-start the testing.
I will adjust my logging bit-mask as per your earlier e-amil.
Cheers,
Adrian
So I uploaded Arducopter 3.5.4 and set up the firmware for Heli_Dual using Mission Planner 1.3.52.
After rechecking all of the head settings I started setting the PID to starting defaults as per the Trad Heli tuning wiki page.
The copter is using flybar heads but I cannot seem to find the H_Flybar_Mode in the “Full Parameters List”.
Was this parameter removed in 3.5.4?
Cheers,
Adrian
Hi Adrian,
Looks like the parameter is hard coded for no flybar. So you can still use the code even though you have a flybar. Just keep your P and D gains set at zero when you do your tuning. So skip the parts on P and D tuning.
Bill
Bill,
Thanks. I will proceed accordingly. Snow in the forecast for tomorrow so maiden may be a couple of days off.
Cheers,
Adrian
Just loaded 3.5.4 on mine yesterday
Today’s flight was excellent even in loiter without any adjustment from 3.4



Sorry to disappearing for a long while
Been very busy studying (can’t believe I got ‘C’ in Control System  )
)
3 Likes
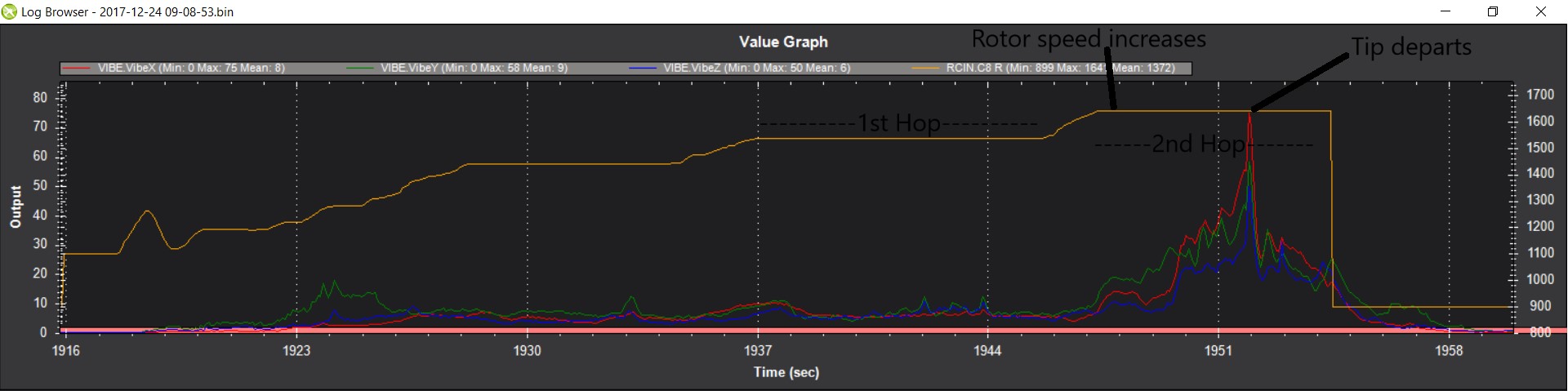
The snow held off so I enlisted the aid of my son (skilled 3D RC Helicopter pilot) and we headed up to the park. I had set up throttle on a rotating knob for the first flight. In the video you will see a short hop, an increase in throttle setting and then a second hop. During the second hop, the tip of one of the rear blades failed (you can hear it in the video). Blades were very cheap plastic blades from HK clone 250 kits.
Very clear vibration increase in the log (BGO - blinding glimpse of the obvious) once the tip departs!. Need to get better blades.

Will try again once I have new blades.
Cheers,
Adrian
Adrian,
That’s awesome that you got the maiden flight in. How did it feel? I assume you just had FF gains at this point. Did the response in pitch and roll feel about the same? I will look at your log when I get a chance. Great stuff!
Merry Christmas,
Bill
Bill,
Yes, default initial tuning values with VFFs set to 0.22 for a fly-bar head.
My son felt that it was stable and responded to commands as expected. Not a lot of hover time to get a real feel for the performance before the blade tip departed.
Cheers,
Adrian
Looks far better than my first hop 
Very good for a 250 flybar.
And yeah, those plastic blades are useless (and have weird smell on mine)
Luckily it didn’t break at its root.
Adrian,
I looked at your log. First I’ll talk about your Vibes. It appears from the video that you flew the first hop at one rotor speed and then increased it and flew the second hop at the higher rotor speed where the blade came apart. I used channel 8 as well as the audio from your video to determine that you had changed rotor speeds. So the first (lower) rotor speed that you flew at resulted in very good vibes. The second hop resulted in much higher vibes that were in the marginal region (30 to 60) for the EKF before the blade came apart. You can see the Vibes in the graph below.
Change your log bitmask to 393215 please. That will give us 25 hz logging of your Rate and IMU messages. The RATE data was logged at 10 hz which makes it difficult to see the vibrations feeding back into your control system. It looks like the pitch axis is tuned fairly well with the current value of VFF. The Roll and Yaw look like they need some work. However that all depends on whether you like the feel of the responsiveness of the aircraft. If it is too responsive then bring down the respective ATC_ACCEL_X_MAX parameter
Hello Everyone, i am trying to build tandem heli using pixhawk, but i am not able to get servo motor connection to pixhawk from the blog or pixhawk website, can anyone tell me how to do the connections of the servo and main motor to pixhawk.
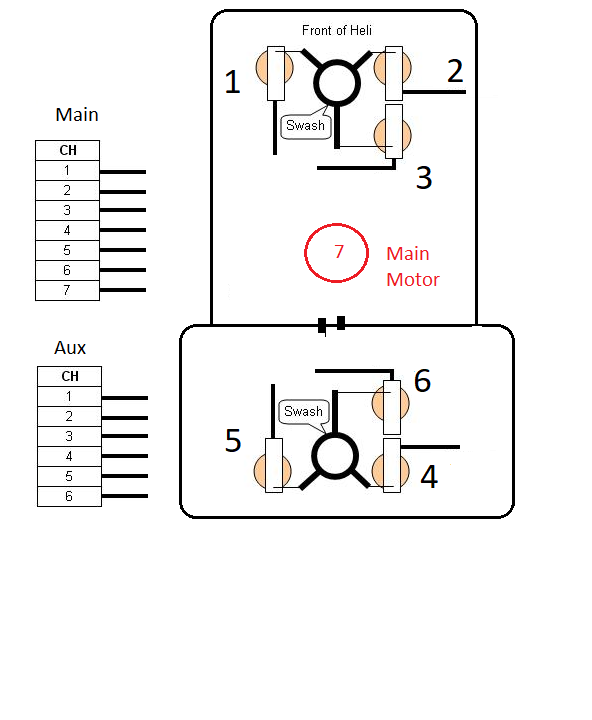
thanks in advance. i am sending a sample image which relate to my tandem design.
i am not able to understand what does these means.
H_SV1_POS,-60
H_SV2_POS,60
H_SV3_POS,180
H_SV4_POS,60
H_SV5_POS,-60
H_SV6_POS,0
i am newbie. so dont know much about these. thanks
Hi,
The parameters that you have listed are the servo position parameters. This is used for the CCPM swashplate setup. Most swashplates have arms that are spaced 120 deg apart. There are some that are spaced differently and you would have to adjust the servo positions based on this.
The servo position that is entered for each of the servos is the swashplate arm position in degrees with 0 deg for an arm pointed to the nose of the aircraft (as shown as servo 6 in your diagram). Then arm positions on the right side of the aircraft would be positive angles from 0 to 180 degrees and arm positions on the left side of the aircraft would be negative angles from 0 to 180 deg. So servo 4 in your diagram would be 120 deg and servo 5 would be -120 deg.
For a tandem helicopter, you would use the main channel outs from the pixhawk. You won’t use any of the Aux channel outs for swashplate servos.
For the set up you have shown in your diagram, the parameters would be as follows
H_SV1_POS,-60
H_SV2_POS,60
H_SV3_POS,180
H_SV4_POS,120
H_SV5_POS,-120
H_SV6_POS,0
I hope this helps.
Regards,
Bill
1 Like
Thanks @bnsgeyer
you solved my problem.
and we will connect main motor to CH-8. i read it in code, kindly correct if i am wrong.
thanks in advance.
@vikramdabas Glad I could help. Yes, Ch8 is the default output for the main motor. If you look at the Servo8_function, you will see that it is 31 - main motor RSC (rotor speed control).
Thanks dear @bnsgeyer
Can you help me setting futaba radio also,
Throttle link to CH8
Yaw to ?
Roll to ?
PItch to ?
or we can use same settings of futaba as traditional heli
On the transmitter side, the setup should be the same as tradheli. I recommend using an SBus receiver and connecting the SBus output from the receiver into the RCIN port of the Pixhawk. Do NOT use a helicopter model type in your Transmitter. An airplane model type is fine. The Throttle, Elevator, Aileron and Rudder channels from the transmitter will be mapped correctly to the pixhawk without having to change anything. The motor interlock feature is mapped to channel 8 of the transmitter and you set your ESC control based on what you choose as the RSC mode. I recommend using a motor and ESC with a governor function. Then you would use RSC mode 2 (setpoint).
Be sure to visit the Trad Heli wiki here for more details and Chris’ set up videos. There are some dual heli parameters that he doesn’t cover. Hopefully some of that is covered in these two discussions that you’ve posted to.
Hi to all,
sorry if i wrote into this discussion, but i am new to arducopter and building a small class 130 tandem heli.
I have already watched and setup the pixhawk 4 mini as told into the 4 video for the trad Heli wiki, plus configurated the 6 servo degree.
There are some other trik for better setup of a tandem Heli?
Thanks a lot
Best Regard
Matteo
Hi Sergio,
i have finished the initial setup and tested it on bench without blade, but never do a ground real test and resonance test… The work take me a lot of spare time and the frame are still into building process… 