I’m trying to fly a tandem with Mission Planner using Pixhawk 1.
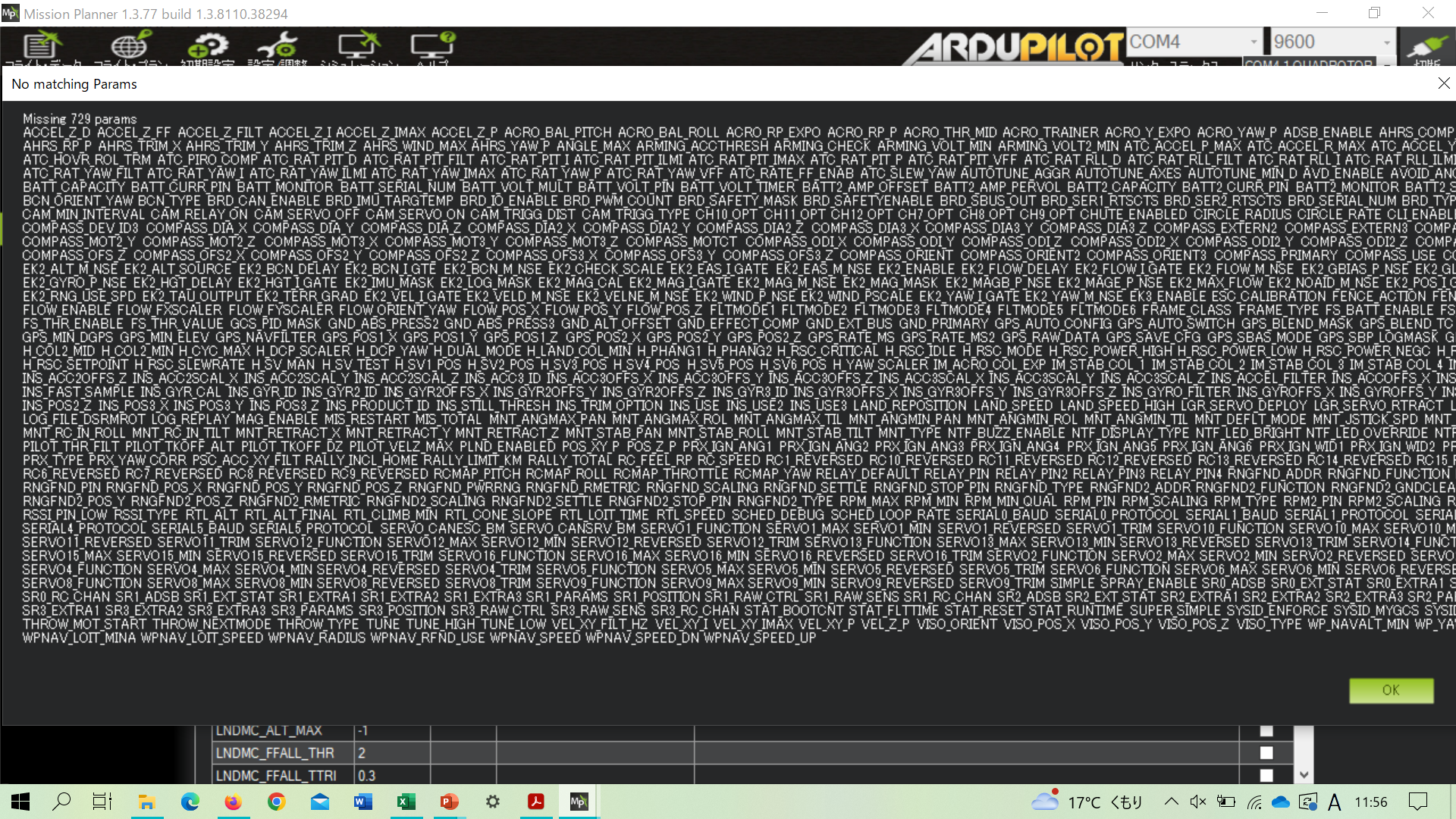
However, when I connect Pixhawk 1 and look at the parameter list, the following parameters are not displayed.
Also, if you try to open a parameter file that contains the above parameters while Pixhawk is connected, the screen below will appear and you will not be able to open the file. (If I don’t have Pixhawk connected, I can open the file.)
Hi @Iwamoto
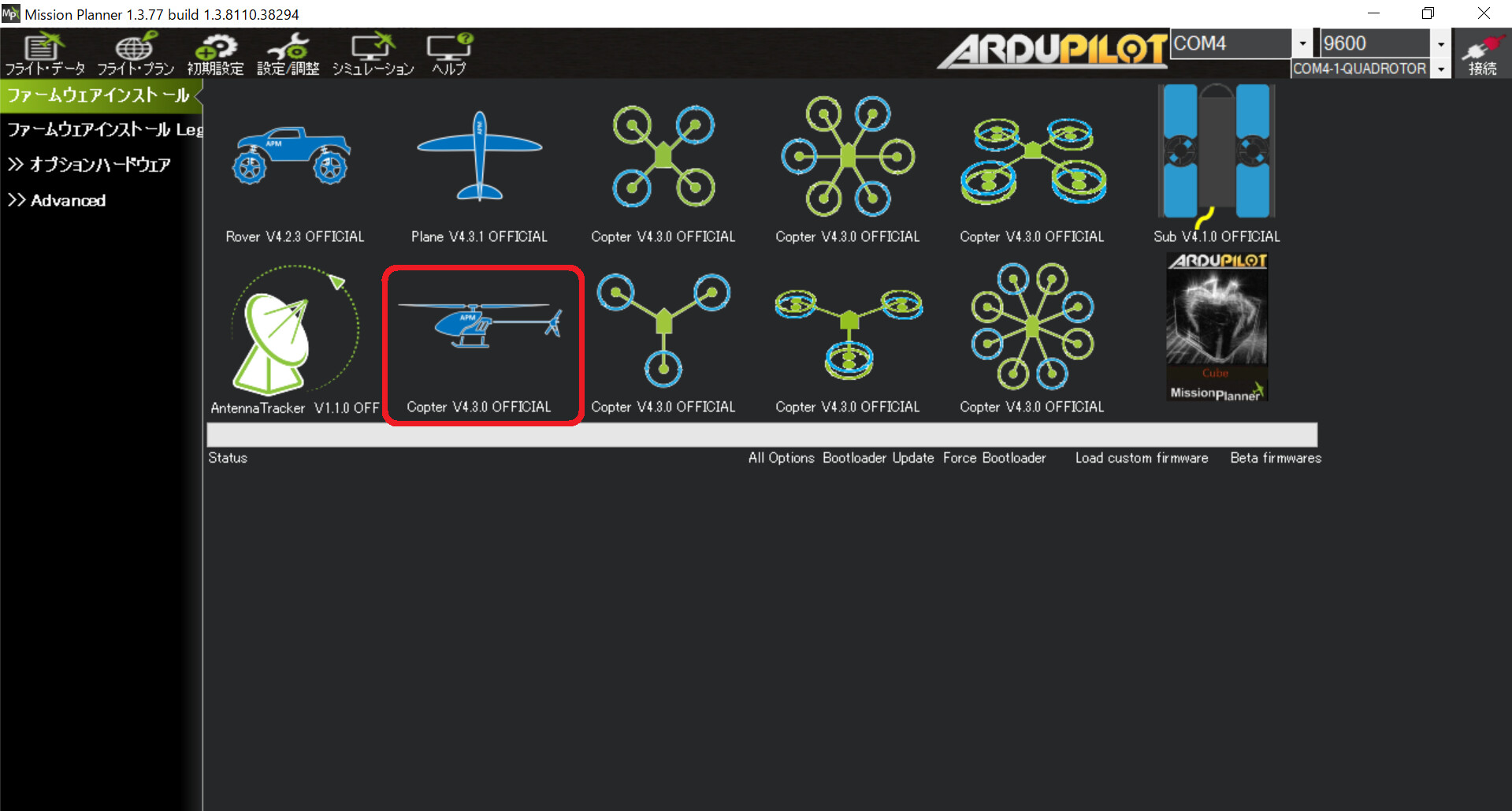
Did you load the Helicopter version of ArduCopter? What is the version that you loaded?
You can check the version of arducopter firmware by looking in the data tab of mission planner. Go to the bottom panel and you’ll see more tabs there. Select the Messages tab and look for the version of the arducopter firmware. Be sure that you are connected to your Pixhawk when you do this.
These parameters are not automatically displayed unless you choose the generic swash plate type for each of the swashplates. If you have one of the standard swashplates, then just use that option for the swashplate type.
You can find the swashplate types that are supported in the wiki. https://ardupilot.org/copter/docs/traditional-helicopter-swashplate-setup.html
Is fore & aft pitch control on a tandem do swashes just use collective? As in do they move collect for the whole front rotor with no tilt?
I am asking because I am curious about support for 2 point swash plates (4 servo) on tandem. If its just differential collective then it would be possible to simple use 4 of 6 servos outputs normally used for tandem.
Yes, for pitch control, only differential collective pitch is used. There is no longitudinal cyclic swashplate used for the pitch axis control. You could probably get away with four swashplate servo if you set it up correctly.