Hi Rolf,
I haven’t fly White Knight outdoor yet due to the Unexpected Left sideward flight was never fixed. The control signal output is correct but the drone can not self-balancing itself during hover it always flies Left sideward that I need to use one of my finger to push back to keep it hover stable. I believe it is caused by my pore coding skill! I hope you can help me on this by pointing out which codes need to be changed!
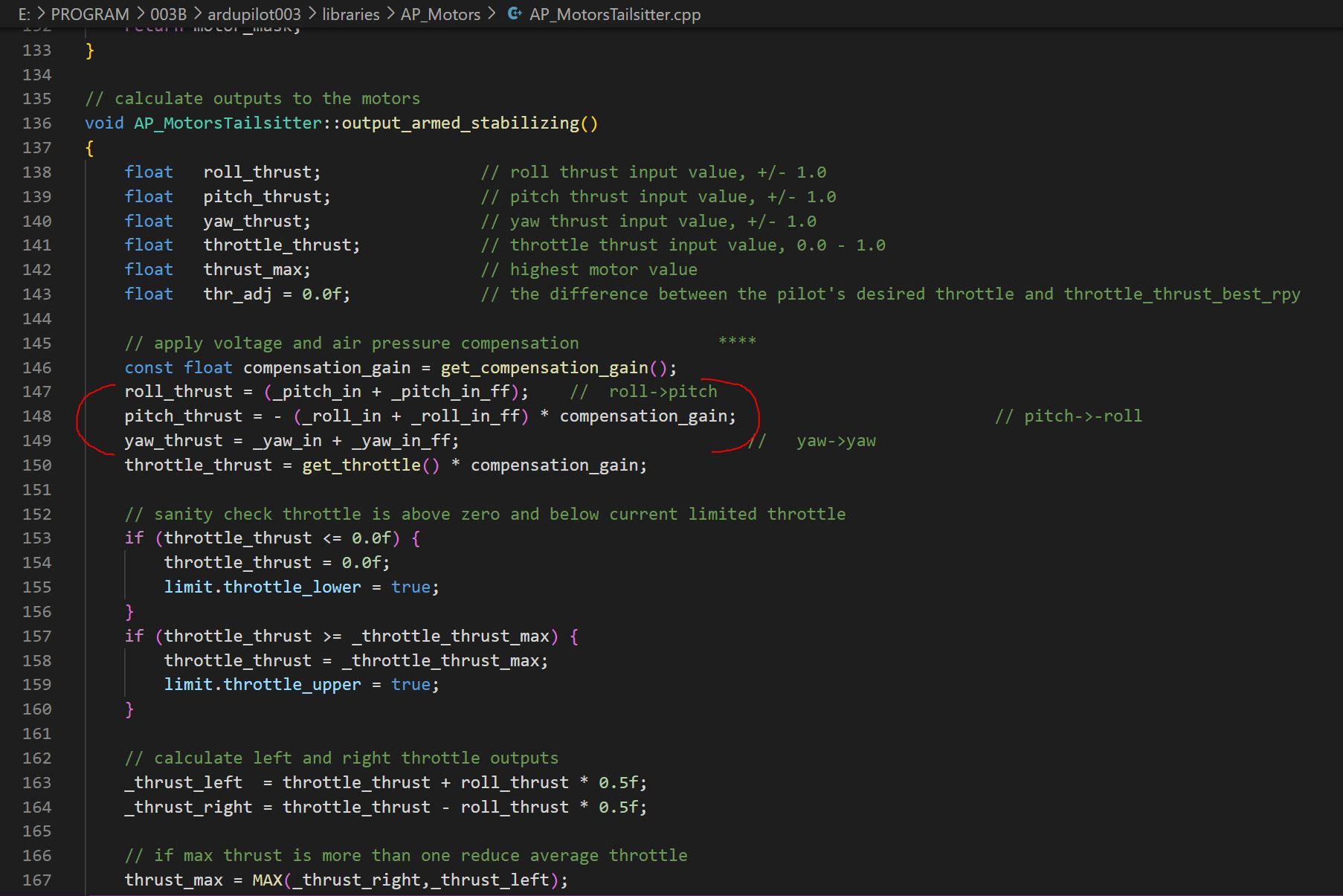
Here are the only codes I changed to build Tandem Bicopter(Ap motor tailsitter.cpp)
Can you point out the problems for me?
Although I am an Aerospace college student and inventing VTOL craft is my habit, there is a lot of things I need to learn from you guys especially my professors have no idea about coding and building drone. Please fill free to point out my mistake.
According to this reply if I understand correctly you never try to change the motor matrix. Is that correct?
Another question here according to my project should I switch pitch and roll in PID?
I am having some problems with the new Pixhawk 6X but I guess I can fix them to perform a V-22-like Bicopter hover test flight with the new welded“Testbed for Tandem Bicopter”(which is welded perfectly symmetric) tomorrow.