A friends Talon crashed on launch unexpectedly the other day and he’s not sure why, it had flown many times previously without any issues.
It was launched in FBW-A mode and the aircraft apparently rolled upside down and crashed. I can’t see anything obvious in the log but hopefully someone can shed some light on why the plane suddenly crashed after having flown fine the previous flight.
I have flown on-takeoff crashes that sound like this one when I accidentally had the Center of Gravity too far back. Could that be the issue?
In fact, my most notorious repeated-crashes were from mistaking the rear-ward limit for the CG with the “desired CG location.” Despite being extremely careful about always checking my CG placement, that misunderstanding led to unpredictable on-takeoff crashing.
Thanks but I don’t think so, he always uses the same battery, placed in the same position, held with a velcro strap so I doubt it could be placed further back. I flew it in full manual mode a few weeks back with the same pack and it was fine, didn’t feel tail heavy and wasn’t twitchy on pitch. I also don’t think the battery could have moved with the throw.
There is really a lot of power at launch with a peak of 2600 watts and probably a wrong launch pitch angle, the att_pitch goes to 26,9 at launch , then a Rcin_C2 at 1000 and Des_pitch at 25 .
With so much power the plane in Fbwa must be launched straight and then pitch command must be moderate.
He’s a good launcher with lots of experience so don’t think that was the problem but I’ll ask how the throw was.
I’m pretty sure that the amps shown in the log is incorrect, 132A peak is too high, he only has a 60A ESC and his battery I think isn’t capable of 130A+. I’ll ask about that as well.
With a lot of power though the angle of 26° would be no problem and the pitch angle in FBW-A is always moderated.
Looking at the log again, at the point where the plane starts to roll: DesPitch is 25°, Roll is -14°, RCOU.C2 is at 1480 (so almost neutral). This increases to 1864 at the time of the crash. Pitch at that point is -33° and roll is 160°, airspeed was 15m/s so more than fast enough for the ailerons to correct any adverse roll.
Yet somehow the plane just rolled despite RCOU.C1 being at 1170, and with enough airspeed so it shouldn’t have.
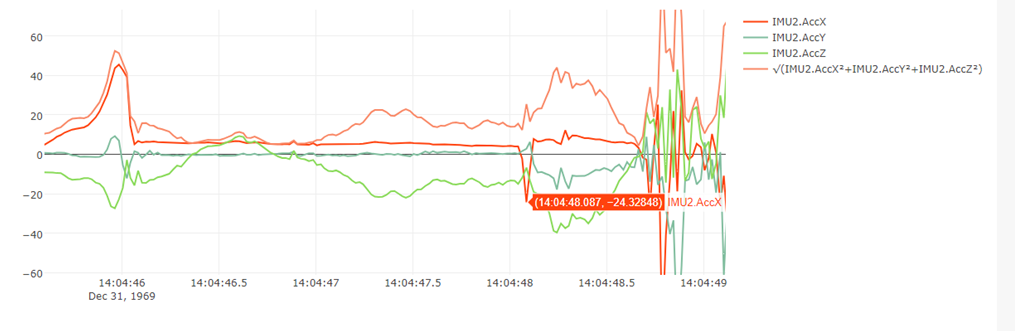
There’s a sharp X deceleration (2.5g toward the tail of the plane) about 0.1 seconds before the divergence between pitch and roll. I wonder if his autopilot board separated from the plane. It’s as if he hit a bird or the battery smacked his flight controller. It’s odd to say the least.
Odd indeed! I even thought maybe the aileron servos were connected wrong but they’re on a Y-lead so that couldn’t have happened.
The battery was held by a substantial velcro strap and the Pixhawk likewise firmly on a large piece of quality velcro. I have the remains with me and nothing that I can see in the remains that could have hit the FC, I think too he would have said if he hit a bird (unlikely).
So what could have caused the roll to be unconstrained?