Hello, everyone!
Recently I built a tiny whoop, But the ALTHOLD doesn’t fly well. I’ll keep the barometer as far away from the propeller as possible, which solved the problem of fast up-and-down during takeoff, and the height of the copter drifting near the ground.However, I found that the copter height in ALTHOLD mode was lagging behind the desired height of the throttle rocker, which caused the throttle rocker to return to the midpoint, and the copter was still climbing for a dozen seconds.[
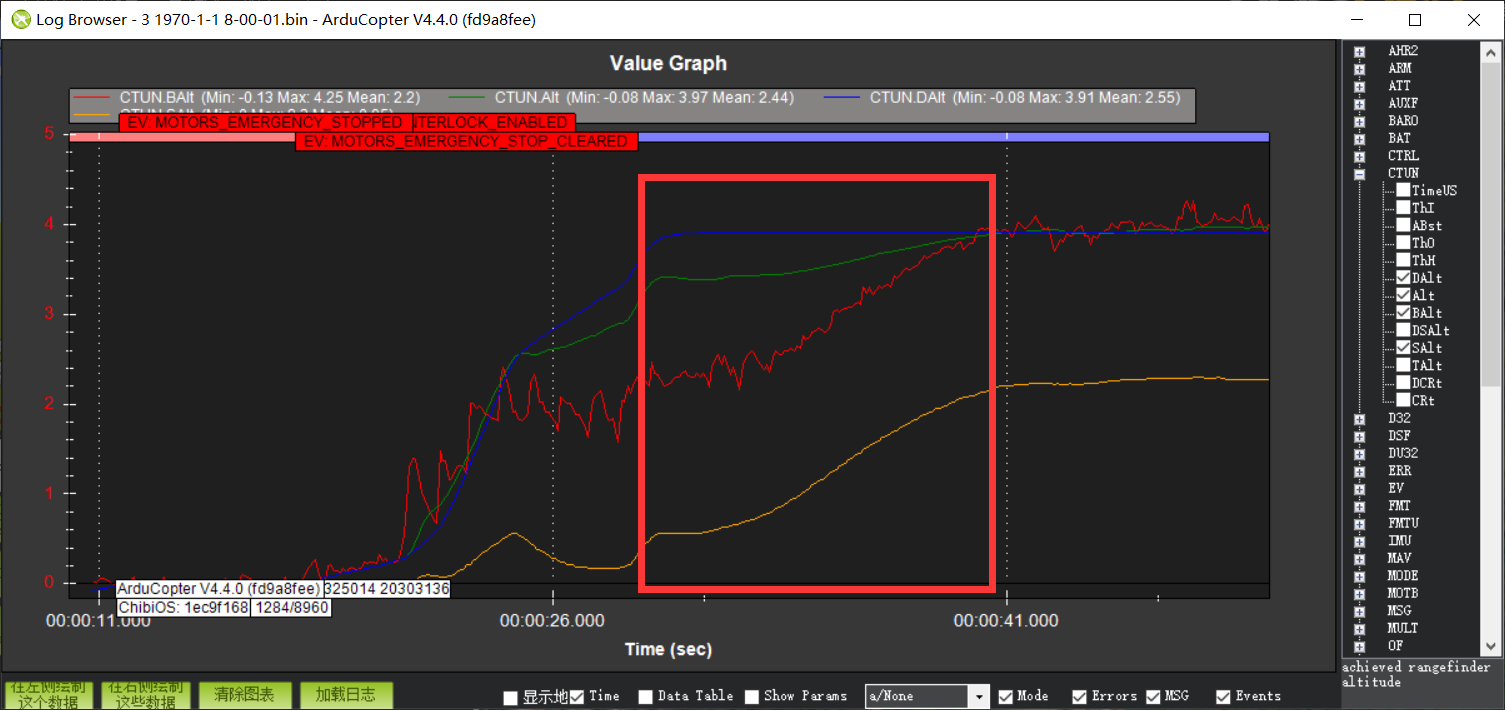
This is the log connection
](1.bin - Google Drive)https://drive.google.com/file/d/1Nsw7-U26oYhmJGHybIJmOtnehOjbst2a/view?usp=drive_link