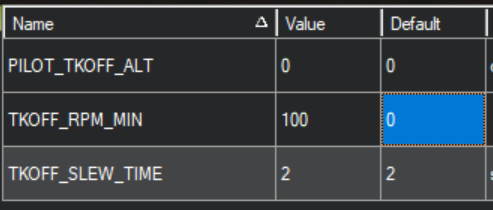
I am trying to use TKOFF_RPM_MIN functionality to avoid topple during takeoff. If the motors aren’t spinning at this RPM then the vehicle should not try to takeoff.
Issue description: “Even though the motor rpm average is above the takeoff min rpm, the take off is still getting blocked”.
Hardware Setup
ESC Telemetry-BLHeli_32 compatible connected on AUX-1, AUX-2, AUX-3, AUX-4
I must admit I’ve not used this parameter before but it looks highly useful.
Looking through the code it might only need the ESC RPM data and doesnt appear to check RPM sensor if you have ESCs that provide RPM. I could be wrong, but let’s forge ahead regardless
So try disabling the RPM sensor and see what happens.
It also depends on the ESC/Servo output mask - which most people set when they dont need to.
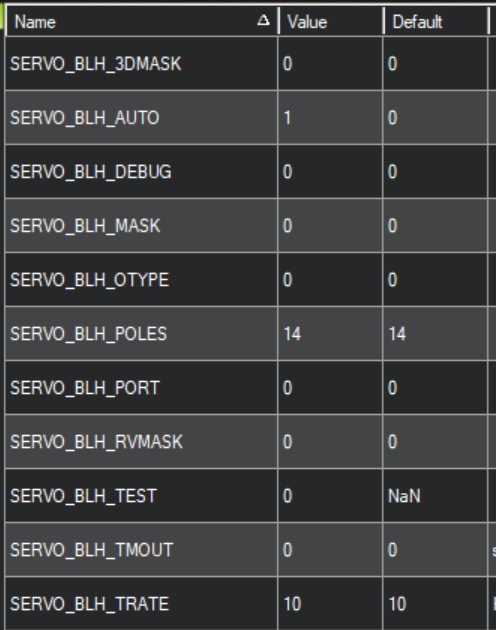
Usually this is all you need for BLHELI ESCs, (plus a few other parameters unrelated to this discussion)
SERVO_BLH_AUTO,1
SERVO_BLH_MASK,0
You dont need any value in the MASK unless you’ve got special BLHELI devices apart from your main motors. So if you have something in that MASK that shouldnt be there, that will cause the minimum RPM test to fail too.
I have Setup ESC Telemetry and I am able to receive ESC telemetry data (rpm, temperature, voltage) but when I do set TKOFF_MIN_RPM to any value except 0 it keeps on giving Takeoff blocked: waiting for ESC RPM.
Can you have a look on above parameters and let me know if I have missed any parameters, please?
Seems like it should be working. Do you have telemetry for all your ESCs? Each motor is checked individually. Try increasing TRATE to 50, say and see if that helps.
I was hoping if you could have a look in the log and let me know if something is left to setup.
It would be really helpful in solving the my current toppling issue of drones. Thanks in advance.
I’ve conducted tests in ArduCopter 4.4.4, and the results are positive. The UAV remains grounded until the TKOFF_RPM_MIN threshold is reached. Additionally, I performed another experiment by securing one of the propellers on an arm and attempting takeoff. Despite the tied propeller motor RPM reaching large values like 10,000 or 20,000, the UAV did not lift off. In summary, the feature functions as expected. Thank you once again for your support!