Hello
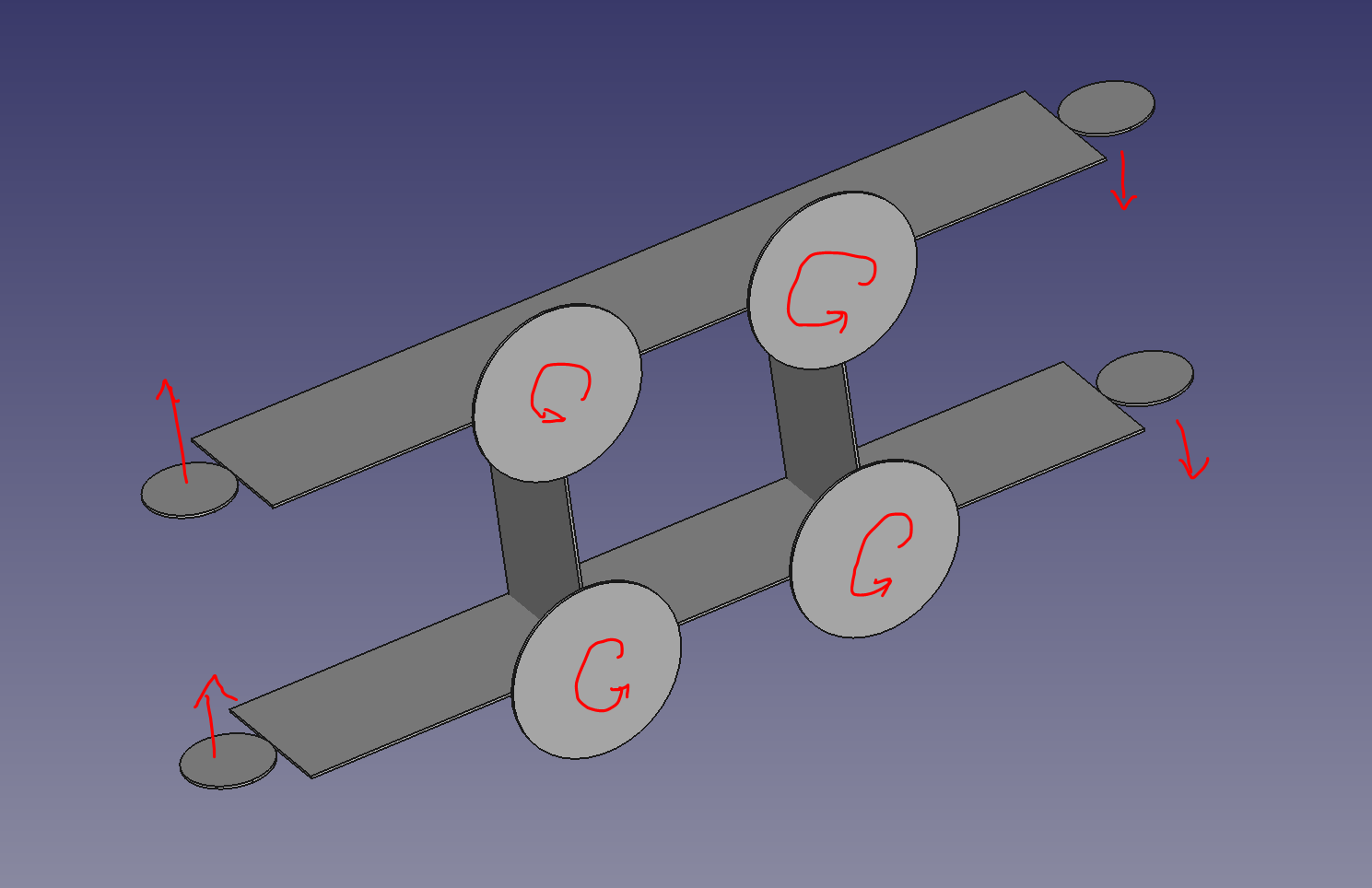
I want to build a tailsitter w. quad x motor with gasoline engines. Since they all have CCW rotation, I was wondering if a “tail rotor” (like helicopter) would compensation the torque and if ArduPilot can handle this compensation ?