Hi everybody,
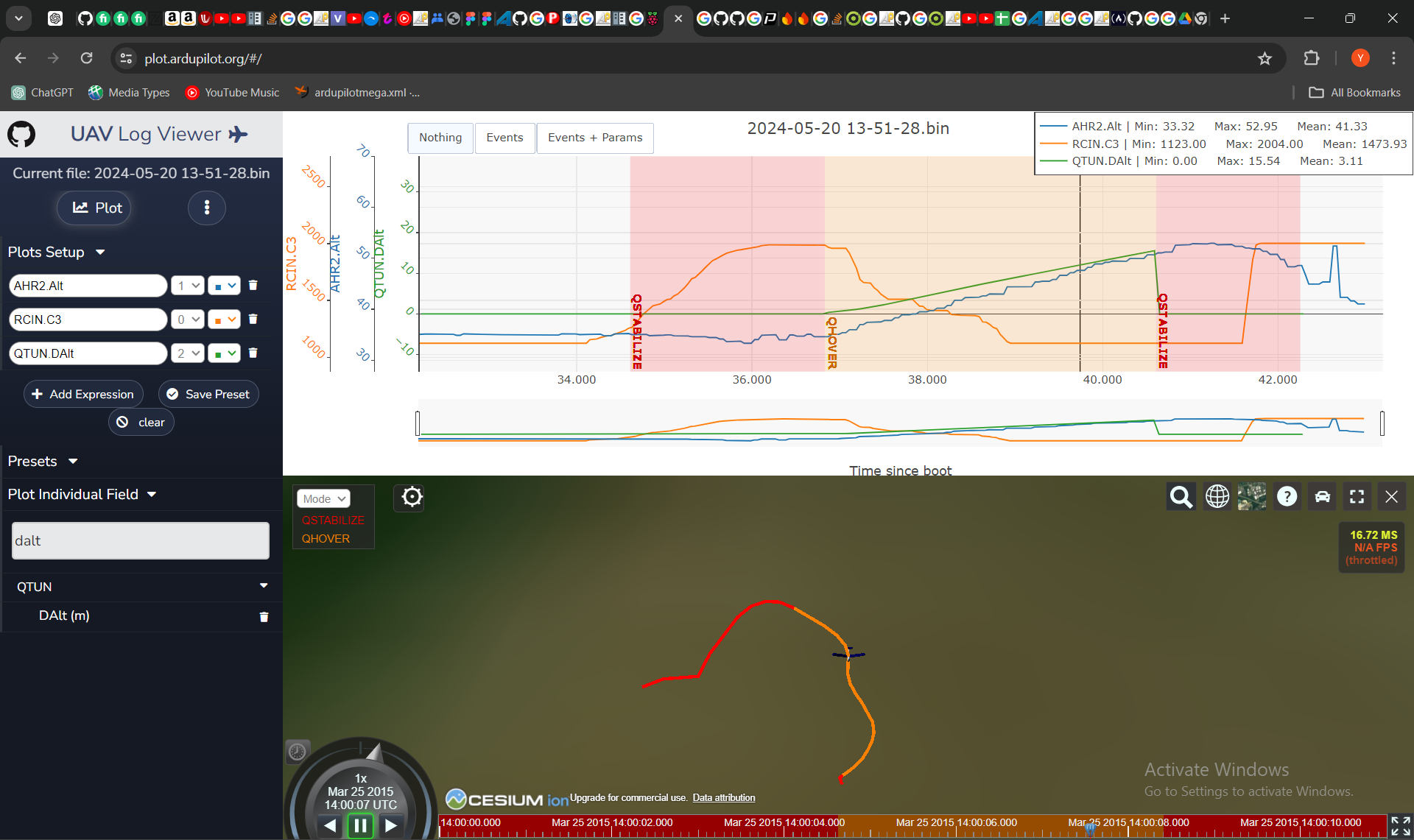
The problem is that our dualmotor tailsitter with aileron setup doesn’t stop climbing whatever pilot does. We started our flight with QStabilize mode as described in the wiki page. And after takeoff we immediately changed the mode to Qhover. After that point vehicle started climbing. Even pilot gives 0 throttle.
Also desired altitude is climbing too. I guess there can be some problem with hover learning because there is no saved number in q_m_thst_hover while q_m_hover_learn set to 2.
There is the log file.
Thanks for your answer!
Since I work in indoors, I usualy close it to check if motors working fine etc. So after changing the parameter, it warned me about sched_loop_rate being smaller than 100. I changed it and it seems to be working fine!
That being said, it also warned me about servo3 and 4 set to 73 and 74 (tilt motor left and right) disabled. The thing is I didn’t set them to 73 and 74, so I disabled them, made a flight, powered off and on, and retried flying and it warned me again about servo3 and 4. It seems like everytime autopilot restarts, it automaticaly sets servo3 and 4. It seemed odd since I set Q_TILT_ENABLE to 0.
Sorry about that. Its a oddity of tailsitter not using the motor 1, motor 2 ect outputs. If you manually set those channels to -1 (GPIO) rather than 0 it should fix the pre-arm.