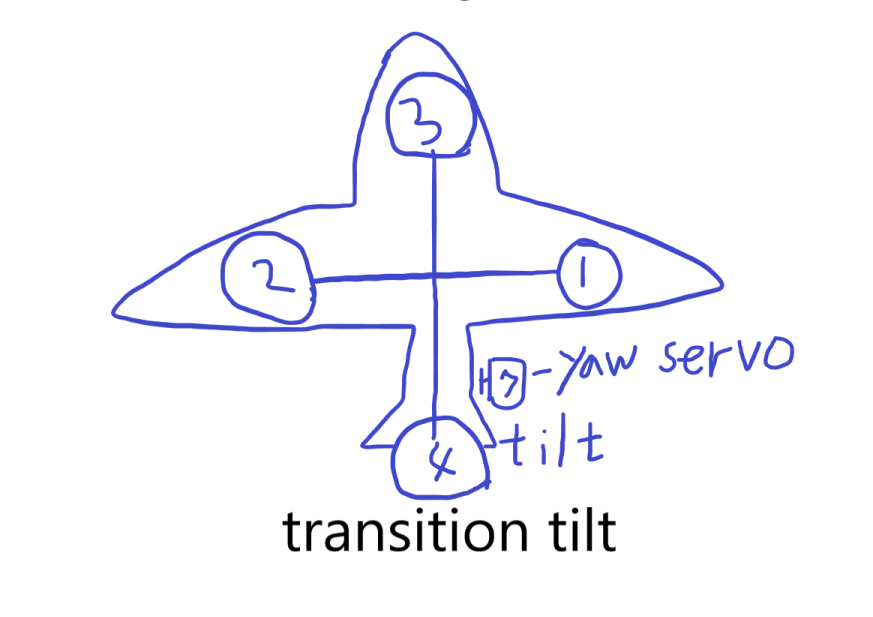
in hover mode (QSTABILIZE)
I want to use the yAW SERVO.
I set it as below in the Armed state, but there is no response even if I move the rudder key.
SERVOX_FUNCTION = Tail tilt servo= 39
SERVOX_FUNCTION = rudder = 21
They say that when you search, it responds when you hover.
There is no response even when hovering
Can you make this react?
Hello LaLa, I’ve just “discovered” this post from you… a little bit late, sorry.
I relation to your issue with servo function Tail tilt servo= 39: I had same problem, no way to make it work.
As solution I’ve dedicated a stabilized rudder channel to Yaw control of nozzle directly from a gyro receiver.
Not the best solution but an acceptable compromise.
Did you find any other way to solve?
ciao
I found that in the code the Yaw control is only for triCopter only, not the other frame.
So your Solution @raddrizzani look the only one for now until creating a dedicated frame/class for it
@LaLa what is the solution for your F35 B ?
I would like to try this kind of aircraft but i think you raised a good point. i have the feeling that ardupilot can’t manage this frame type …
Hi all if needed i have the code to make the SERVOX_FUNCTION = 39 to work with this F35 Frame.
I added a new class frame to manage this conception. this is managing the Yaw link a tri copter.
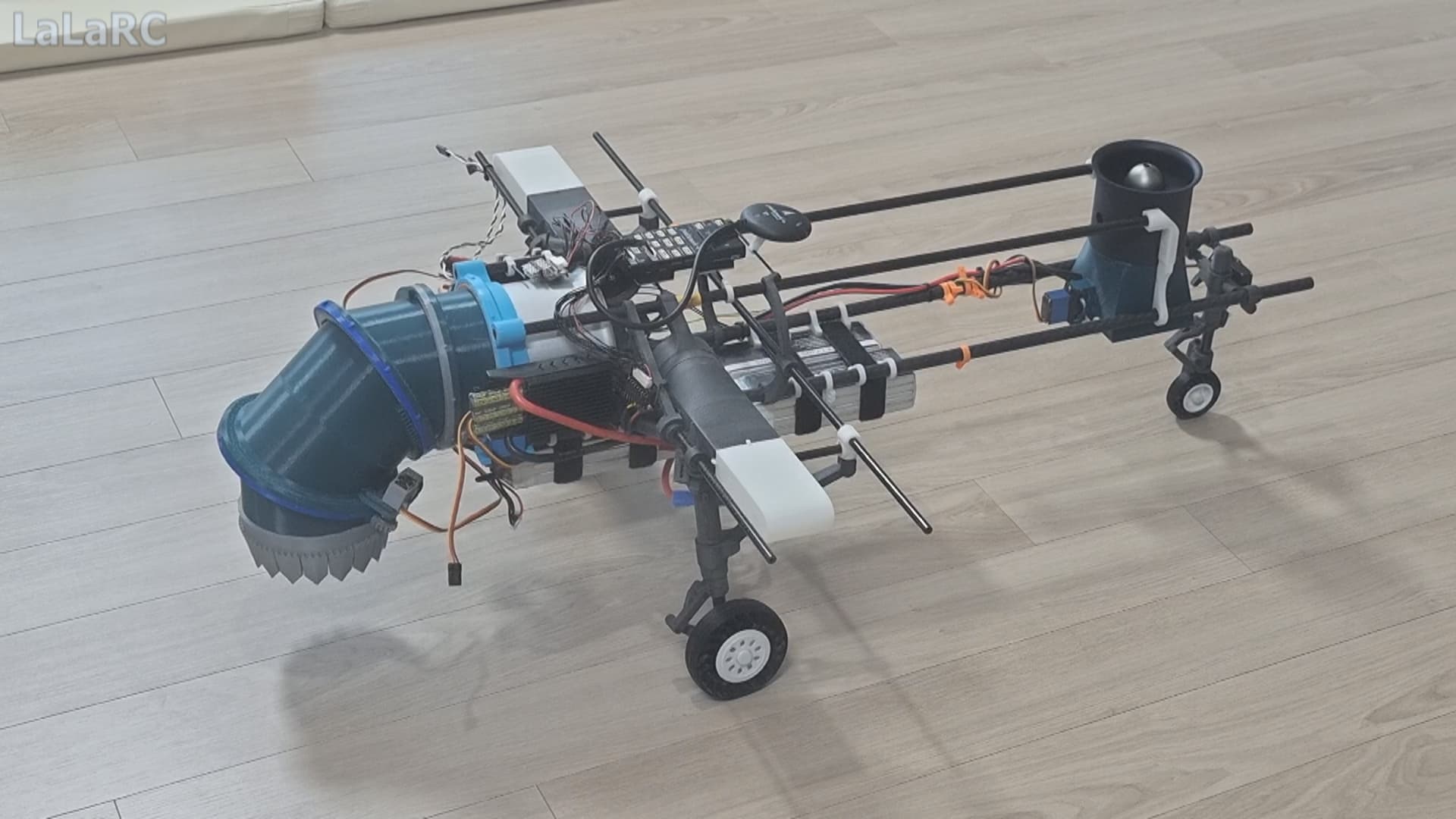
I’m quite building the same type of aircraft here
I’m now improving the model to make it work better (3d Printing in progress)
It’s been a while since I logged in and read your grateful reply.
thanks for your experiment
very amazing for your plane,
Are you currently adding a new frame?
Please explain in detail so that I can use the new frame. I am a beginner in ardupilot. thanks for your comment