So we are getting there and I think you could increase INS_NOTCH_ATT to 40 and see if it reduces the vibrations more.
@ChrisOlson from the vibration data it appears he is running his head speed just shy of 1500 RPM. But you have a good suggestion, a different headspeed may give better vibration results. It is alway better to fix vibrations mechanically if possible but it looks like our filters are doing a good job.
Edit: thinking about chris’ suggestion more, that may be good to do. Reason being is that the rotor speed you are using currently is resonating with the aircraft structure and exacerbating the amplitude. If you move away from this frequency then you move away from the natural excitation frequency of the structure and your vibrations should reduce. To do a good comparison, you want to do this with the same filter settings so you can see when it gets better.
If it’s 1500, then try 1520 or 1540. It usually only takes 20 rpm or so to move away from a resonant frequency that causes vibration to reach the controller. With pistons I’ve seen it where you can even see a frame vibration in the tail, move it up by 20 rpm, the tail quits vibrating and the vibration to the controller cleans up. When I see that I usually move it up by another 20 rpm and see if stays clean. If it does run it as far away from that resonant frequency as you can, without over-speeding it.
You can many times see the effect of these dynamic imbalances when spooling down. A helicopter that runs smooth otherwise may rock on the skids or shake the tail at a certain speed as it slows down.
Just about all of them will exhibit this to a certain extent, even in full size where you sometimes get noticeable stick shake during spool up or spool down. And then there’s some, like Robinson’s that shake the stick all the time no matter what speed it’s at and you can tell by the frequency of the stick shake if the headspeed is right or not.
I didn’t try to increase the head speed, I will try it but I would like the Heli to run as low as possible in order to get max flight time (I see 700 heli running as low as 1000rpm).
I’m thinking maybe the FC location is wrong (half on the frame and half on the tail boom).
Chris, can you please explain what fps calculation is? why it’s rising with the frame size?
Bill,
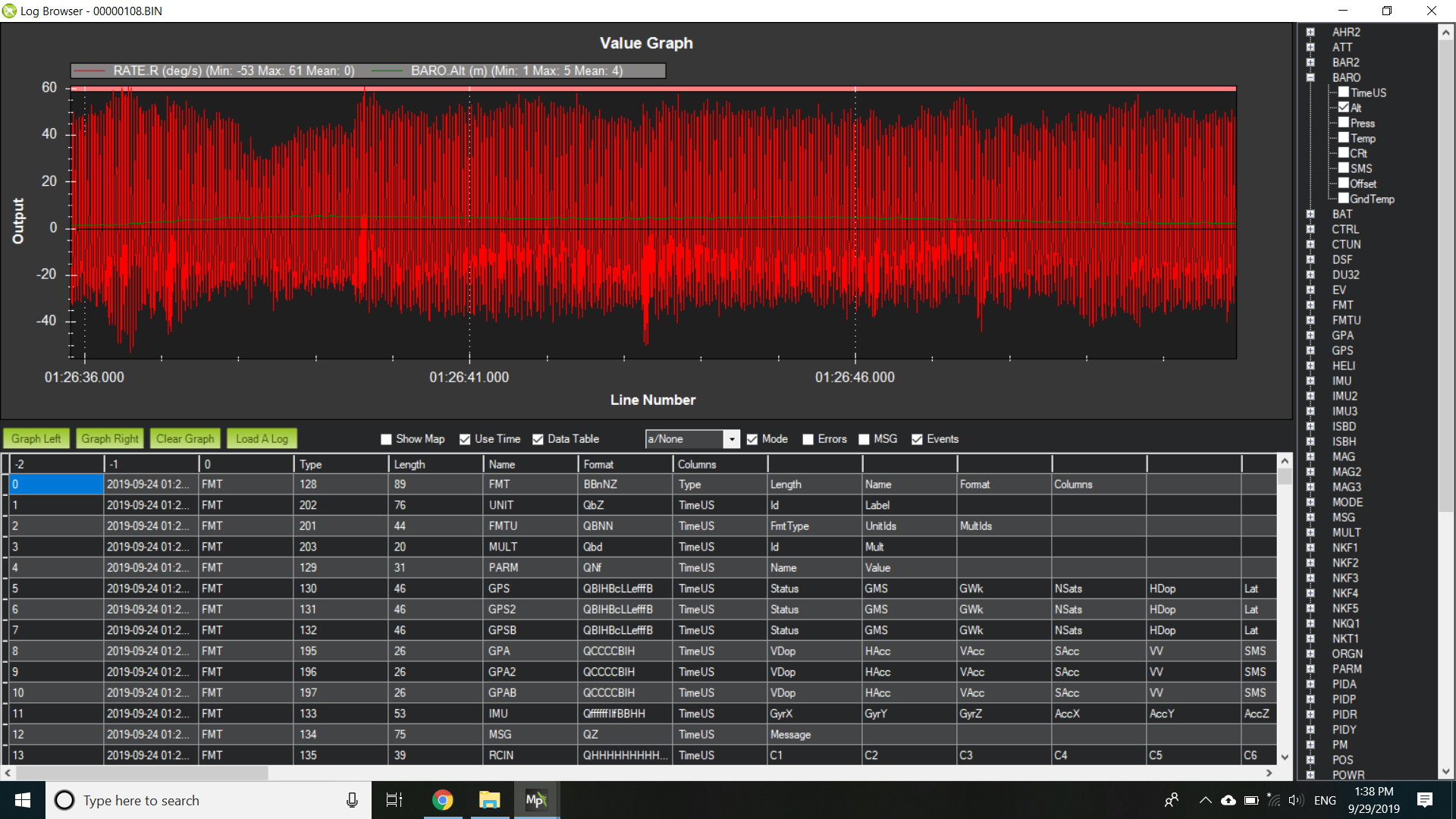
I can see the big different after the filter activation but why I cant see any differences in the VIBE graph?
Rotem,
So the filters have no effect on the VIBE log data. This is showing the raw vibration data. I think it does this because the EKF does not use the filtered signals. The filters are designed to be used for the attitude and rate controllers only. For some reason the EKF can’t use the filtered IMU data. It has to be unfiltered and so it is still important to keep the vibrations low so it doesn’t effect your EKF solution.
It is pi * diameter of rotor * rpm / 60. It is the main reason RC helicopters can’t go as fast, can’t carry as much, and aren’t as stable as full-size manned helicopters. In full-size, anything over 2.5 lbs/ft^2 disc loading will be running at 700+ fps. Light utility class and trainers <2.5 lbs/ft^2 will be from 550-650 fps.
Since RC is typically not more than 1 lb/ft^2 you can get by with 450 fps. But it’s not ideal. The amount of lift from the rotor is related to the square of the speed. Sacrifice lift for low speed to get more flight time, expect that the helicopter will be sluggish, unstable, will have poor payload capacity, and poor forward flight performance.
Obviously, 800-class and larger machines have a larger rotor, it is more practical to get to similar performance and stability of light utility class full-size. 700 and smaller will never make it to that performance level because their rotors are too small and it is not practical to run them at high enough rpm to get there. So they will be performance-limited and fly at lower disc loading than a larger machine. Sure, you can run a 700 at 1,000 rpm but that doesn’t mean it flies decent or is stable unless it is very, very light and carrying only a battery for a payload.
So in practical terms a Bell 206B-3 Jet Ranger with a 37 ft main rotor runs at 394 rpm, blade tip speed is 763 fps. It can take off at 3,200 lbs, which is ~3 lbs/ft^2 disc loading. Can your 700 helicopter take off at 61 lbs gross weight to match that disc loading of the Jet Ranger? No, it can’t. That’s because you’re running the rotor too slow. You’re lucky to get a 700 to take off at 20 lbs, which is 1 lb/ft^2, and it certainly isn’t going to do it at 1,000 rpm.
A three-blade rotor of the same diameter has higher disc solidity, will produce more thrust than a two blade, requires more power than a two-blade, and is less power efficient due to introducing more drag vs the amount of thrust produced (called lift to drag, or L/D, ratio).
In full size helicopters the primary reason to add more blades to the rotor is to create more lift from a given rotor size at the expense of fuel efficiency. Two-blade rotors are the most fuel efficient, generally speaking. But if you compare two common trainers, the Robinson R-22 with a two-blade and Guimbal Cabri G2 with a three-blade, the G2 has a smaller rotor but the blade tip speed is the same at 650 fps because the G2’s rotor turns at 530 rpm. The G2 is also a heavier helicopter but it burns more fuel than the R-22. The G2’s heavier rotor gives it better autorotation characteristics.
One of the main advantages of a three-blade is that they are fully-articulated soft-in-plane, where the two-blade is a teetering semi-rigid type, subject to mast-bumping. RC, however, has quite crude rotorhead designs compared to full-size so you will likely not find a fully-articulated RC three-blade head.
So there is pros and cons, but there is no free lunch.