I have a Trex 700 with Pixhawk 2.1 and when I’m flying in Loiter mode the tail is bouncing up and down during forward and backward flight.
Maybe someone know what could be the problem or what parameter need to be change to eliminate it?
in addition, the Heli is flying very slow at Loiter (even if LOIT_SPEED param is set to 1250).
Rotem,
I looked at your log. I didn’t really notice that kind of behavior in your log. It showed a number of switches between loiter and stabilize.
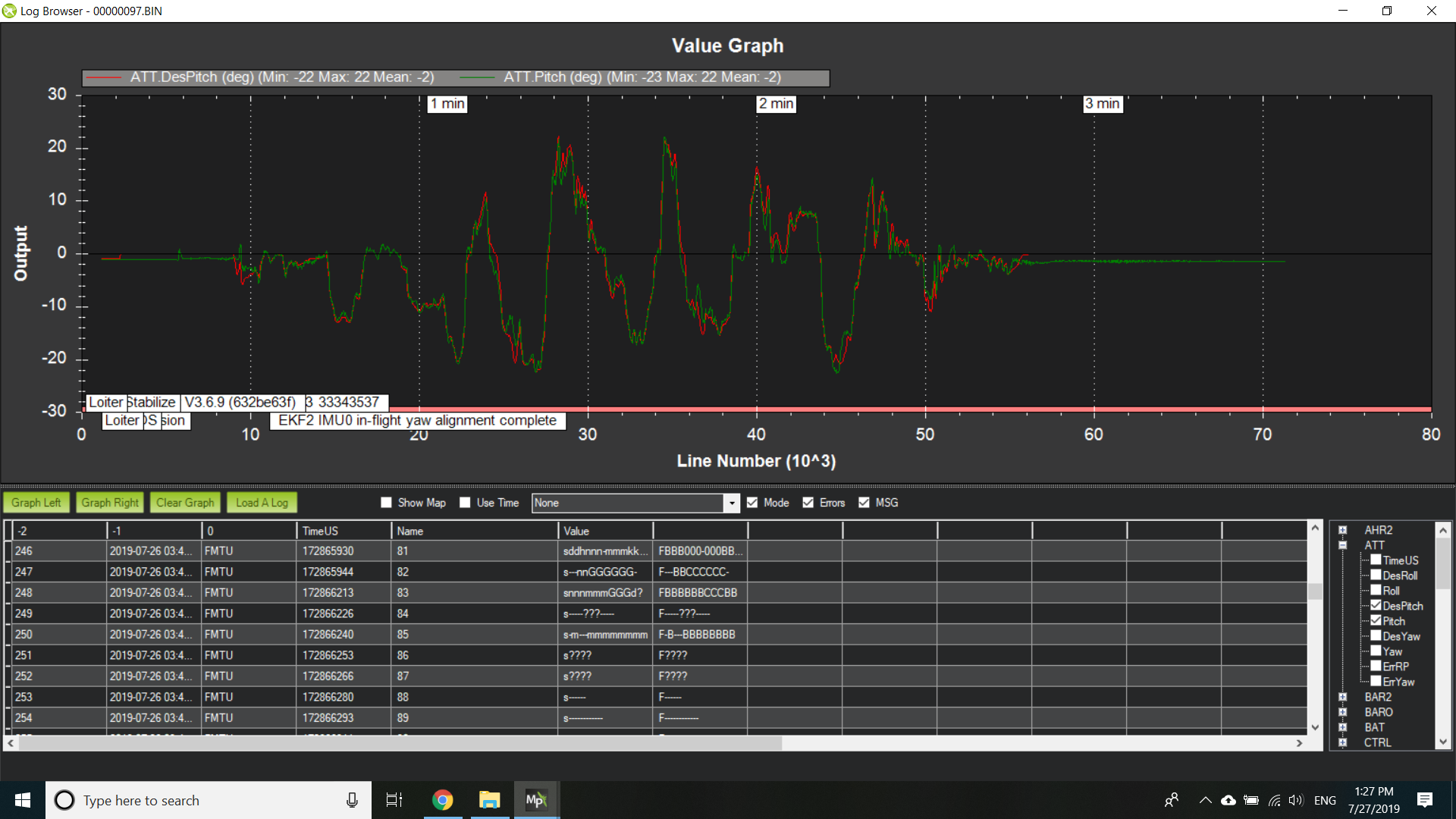
In looking thru your param file, I noticed that your ATC_RAT_PIT_I and ATC_RAT_RLL_I were small (0.047). What made you decide to make these parameters so small. It looks like you just made them the same as you P gain. With heli’s, the I gain must be much larger around 0.2 or 0.3. Not sure if you have looked at your desired pitch and roll attitudes compared to the actual pitch and roll attitude. They do not track very well. Let’s correct your tuning in stabilize before we address your tail bounce in loiter. I suggest raising your I gain for both pitch and roll. I also recommend raising your ILMI for both pitch and roll to 0.08. This will allow the I gain to build enough if necessary for hovering flight.
I didn’t changed the param file (I’ve loaded it from the mission planner, i used setup_mp file) so it’s not my decision to set those parameters to these values.
You need to change your I gains as well. Make them 0.2 to start with.
Do you fly in acro? If you do, you will need to be cautious while you are on the ground with rotors turning. Your stick movements will try to move the aircraft but it won’t be able to since it is on the ground. So you could lose awareness of the attitude the controller is commanding. This could become a big surprise when taking off. So it is best not to move the sticks while on the ground in acro. If you happen to move them and think the controller is trying to command some weird attitude then switch to stabilize and then back to acro to reset the commanded attitude.
Today Iv’e tested the Heli with the new parametes settings:
ATC_RAT_PIT_I and ATC_RAT_RLL_I to 0.2.
ILMI changed to 0.08.
The Heli feel like the respond is delayed to my stick commands.
I’ve upload the flight log file and the param file after the changes.
In addition, I’ve uploaded a video from the flight, you can see little bit the tail bouncing up and down sometimes (I think in this video you it happened in landing as well).
Please advise what do you think and what is the next changes need to be made.
Rotems,
I agree with Fred that you need to increase your ATC_RAT_PIT_ILMI to 0.08. Now that you made the changes I requested in pitch, your actual pitch attitude is following the desired quite nicely. The roll looks pretty good but could use the additional authority provided by the ILMI.
Like I said, the roll follows pretty well until the end when you started flying sideways and you can see a bias develops. Having the larger ILMI will prevent this.
As far as it feeling slower, that is dictated by the ATC_ACCEL_P_MAX and ATC_ACCEL_R_MAX as well as the ATC_INPUT_TC and the rate_max parameters. These set up the target attitudes and rates that the controller then uses the PID’s to match the actual to the target. Now that I feel better about the actual matching the target. try loiter and see how it behaves.
So you want to have a faster response of the aircraft? Why do you need this? Are you looking to use acro? Or do you think you need a faster response to fix you issue in loiter?
To increase the response, you could raise atc_accel_p_max and atc_accel_p_max. So don’t start raising these until we look at loiter with what you have.
No, I don’t want to use acro and not as a fix to loiter, just the delay feeling during flight.
My other Helies feel much more nimble (using Skookum and vbar FBL systems).
Hi Rotem,
For your next flight, could you please make LOG_BITMASK 131071.
Also what is your target rotorspeed? I see you are using RSC mode 3 which is a throttle curve. Do you feel you have the throttle curve set well that it maintains a fairly constant rotor speed?
Also conduct one flight with your current settings and give me smaller roll and pitch rates and then larger roll and pitch rates. You can stay in stabilize mood to do this you will just have to push to stick a little slower for the slow rates and then push it fast for the higher rates.
Then increase your feet forward gains from .15 to .18 and do another flight conducting the same maneuvers. Then post those logs so I can have a look. I’ve been working with Leonard and have learned some things about getting the actual attitude to match the target.