Mechanic: T-Rex 800 Pro DFC with stock components.
FMU: Pixhack from CUAV
Software: Arducopter 3.3.3
After a few Seconds and only a few centimeters off ground, the Helicopter began to oscillate very fast on roll, so that the main blades impacted…
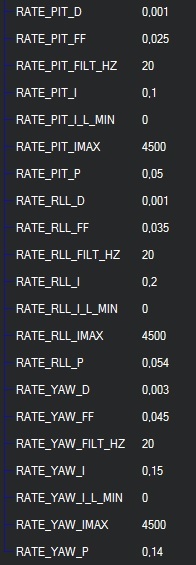
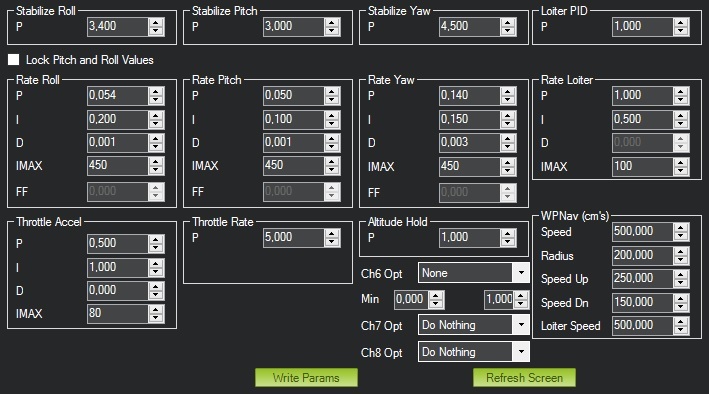
Could somebody take a look to my log file what was going wrong? And please help me with good PID Values for 3.3.3 on a Stock T-Rex 800 Pro DFC?
The mechanic is built very well and was also in the air with a Skookum Robotics and a DJI Wookon H. I have also built a few small and large multicopters with Pixhawk, but it is my first Helicopter with Ardupilot/Pixhawk…
Many thanks and excuse my bad english 
Joa
P.S. Ups! How can i upload a Log? It is not allowed…
