I’m new in heli (used to fly drones but i’ve wanted to try something new) and together with my friend we’ve built T-rex 700 on 12S Li-Po with three blade head.
We were Tuning Heli VFF params, logs were kind of good (in my opinion). Another fly to check params after changes (we’ve raised motor HRSC piont) and CRASH!!!
My friend was in stabilise mode, sudenlly some wind blow made heli to drop altitude so my friend added blade angle to go up and… Heli get into hell oscilations in roll and… crash was SPECTACULAR but why
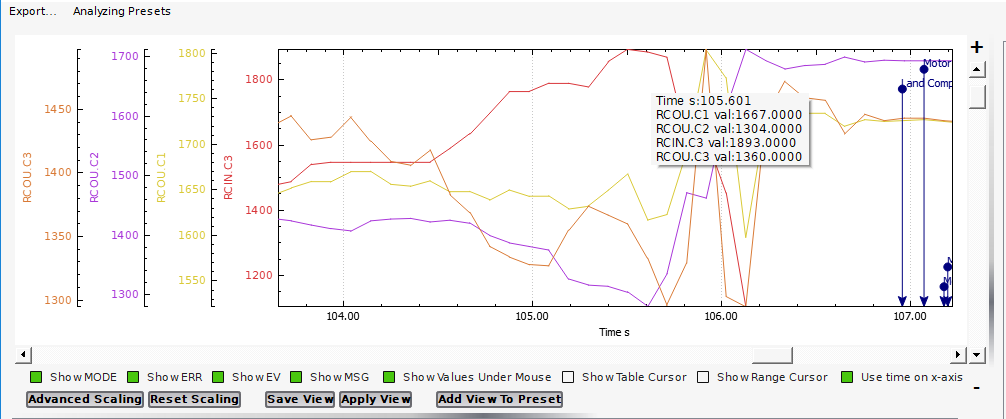
I don’t see any oscillations breaking out. What I see is really confusing. Does your three blade head have leading or trailing edge control? Your servos 2 & 3 are reversed, servo 1 is normal direction. So when your friend pulled pitch, servo 1 should max out, servos 2 & 3 should go to min. It does this just fine.
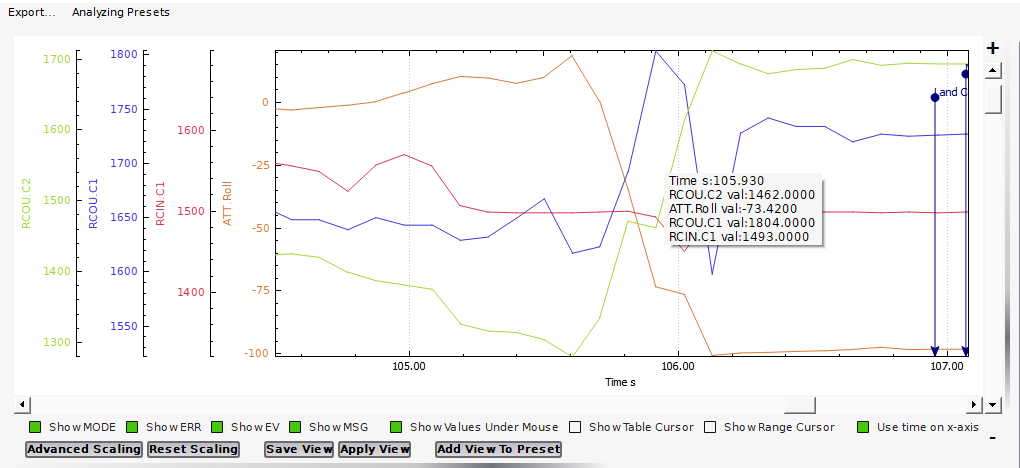
But when it rolled left, to counter that servo 1 should go up, servo 2 go down to tip the swashplate to the right. But since servo 2 is reversed they should both go up in pwm value to counter that roll. But it doesn’t do that. Your friend is bringing the collective down, but it still didn’t respond to the roll correctly on the pitch and aileron servos. Servo 2 initially didn’t do anything, and then they both appeared to respond in the wrong direction after it went past 90 degrees roll.
So this brings up the question of servo directions. Look at the pitch horns on the blade grips on your helicopter’s head. Are they on the leading edge side of the blades, or on the trailing edge side? If they are on the leading edge side, the pushrod or pitch link would have to move up to increase blade pitch. If they are on the trailing edge side the pitch link would have to move down to increase pitch. Just want to clarify which style of three-blade head you have, because trailing edge control requires reversing the swashplate direction, and the version of firmware you have does not support that in Copter. ArduHeli 3.5.7 DOES support it, and has supported it since version 3.3.3. But that feature never went into Copter until version 3.6.
Maybe @bnsgeyer can pick out something different here. But the directions I see the servos going is classic of having a reverse direction head, setting the servo directions so collective goes the right way, but the cyclic is reversed for both the pilot and the autopilot.
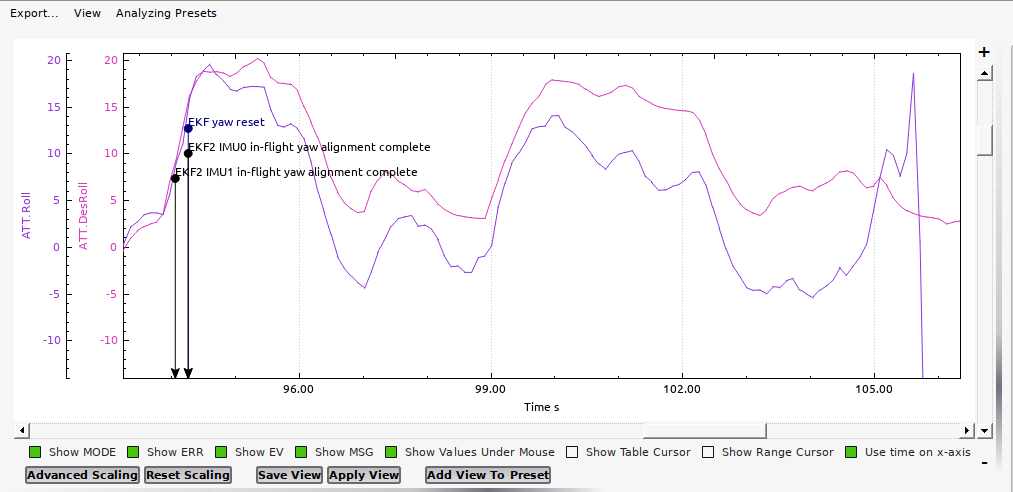
Edit: looking at a couple other places in the log with roll instances, the pitch and aileron servos appear to go the right direction. And there is some considerable divergence between the desired and actual attitude in roll immediately after the EKF yaw alignment got done. And it was pretty good up to that point.
The other thing comes to mind is maybe the headspeed being so low that the helicopter doesn’t respond properly in the wind and the stabilize controller simply lost control of it.
So what was your target head speed with your ESC. Were you using a governor? If so what was the head speed set for? I am wondering if you stalled the rotor and lost control. unlike multirotors heli’s are constant rotor speed, variable collective pitch. Most heli’s require head speed to be 1200 rpm or better. What was your collective pitch range? - 2 deg to 12 deg? Knowing this would help us determine if you had a good set up.
Also I’m sure you already figured this out. but tuning should always be done on low wind days.
We didn’t have governor, we’re using SET_POINT option in Pixhawk to define head speed.
That’s quite possible that we’ve stalled the rotor. We’ve noticed that sometimes when moving fast with lever on radio in colectve pitch servos blocked a little but we ignore that becouse it was working just sometimes it has sort of lag.
If we didn’t get wrong, the head speed was about 1212 rpm.
I know that some of them are reversed but everything was set fine and worked quite well. We’ve done like 4/5 flights before crash happend and heli flew ok in every mode (Loiter, althold and stab).
The setpoint option in ArduHeli is designed for use with ESCs that have a governor. I’m not sure but I’m pretty certain that just requesting a motor speed without a built in governor will result in the motor losing speed when put under load. So not only were you increasing collective pitch to very high values, the load on the motor due to the high collective pitch caused the rotor speed to drop. Just my thoughts.
I think Bill is probably correct, Kuba. This is not common with RC helicopters to stall the blades due to their relative quite low disc-loading. A three-blade head will create more total lift than a two-blade head, so can theoretically be run at lower headspeed than the same diameter two-blade rotor. But if the rotor diameter is around 1580mm at 1200 rpm the blade tip velocity is only 325 ft/sec. That is very, very low blade speed and the airfoils would likely reach critical angle of attack if you combine collective pitch + cyclic pitch. It looks like it did nose down at the same time, I hadn’t caught that when I first looked at the log. So if you combine over-pitching it with the stabilize controller attempting to level it, it is plausible that it stalled the left side of the rotor causing an uncontrollable roll.
If you wish to run the headspeed that low it would be probably be best to limit the collective pitch to no more than about 8 degrees.
We typically like to see minimum 400 ft/sec blade tip speed in a 700 class UAV helicopter. For a 1500mm rotor that would be 1550 rpm.
With the three blade rotor I would still limit the maximum collective pitch to 8 degrees. There is formulas to figure out the total thrust of the three blade vs two blade at various angles of attack. But experience says the three blade at 8 degrees is still going to exceed a two blade at 10.5 degrees of pitch.
@AdHd22 so I looked closer at your log and it looks like you’re using 52% of your collective range to hover the helicopter, which corresponds to only 4.8 deg of collective pitch.
This would agree with my experience of the thrust capability of a three-blade rotor vs two-blade, as there is no way a two-blade rotor would hover at that amount of pitch @ 1200 rpm on a 700-class heli.
If you don’t intend to fly this helicopter at high speeds and want to save on battery power to get more flight time, your 1200 rpm is probably adequate with the three-blade rotor. You just need to limit the maximum pitch so the blades don’t stall due to over-pitching it. 8 degrees of maximum collective, and limit cyclic pitch to probably 7 degrees should allow safe flight speed up to about 40 kts (20 m/s) without running into issue with blade stall. If you need to fly faster than that you’re going to have to increase the headspeed or it will become unstable.
My 700-class Raptor gasser weighs 14.8lbs - it has 1580mm rotor (two-blade). Running the rotor at 1,900 rpm (515 ft/sec blade tip speed) it will go 105 kts (54 m/s) in level cruise before it runs into stability issues**. With the rotor speed at 1570 rpm (426 ft/sec blade tip speed), it will only go 66 kts (34 m/s) before it becomes unstable.
**I think if the engine in my Raptor had more power to be able to run the rotor at 2100 rpm it would probably go a bit faster than 105kts. But it only has 6.8hp @ 14,500 rpm and it’s all the power it has to go 105kts. The point is that blade speed is very important for stability if you want to fly fast.
@AdHd22 just another example of how much maximum collective pitch can affect the performance of your heli:
My bigger piston helicopters with 1820mm rotor can only handle 9.5 degrees of collective pitch. They have the same engine as the smaller Raptor, but they weigh ~20lbs with the fuel tanks half full. Running the 1820 rotor at 1,650 rpm (515 ft/sec blade tip speed) the big gasser will only go 90kts before it runs out of power.
So while I use 10.8 degrees of pitch on the smaller Raptor, I only use 9.5 degrees on the bigger ones. If I run more pitch it can over-pitch it in high speed flight, the rotor speed sags due to lack of power and it goes into a cascade stability failure once it loses rotor speed.
However, the bigger helicopter running more sane headspeed at 1530 rpm (478 ft/sec blade tip speed) has higher max cruise speed than the smaller Raptor at 1570 rpm. It can go 75kts - 9kts faster than the Raptor at the same engine hp output with the throttle wide open. But if I over-pitched it by using the same 10.8 deg of pitch I use in the Raptor the rotor speed would sag and it would be no faster than the Raptor.
Just some examples of how to set that maximum collective pitch. A lot of people set it at 12 degrees (or whatever) “just because that’s what you do”. But it’s not the proper way to determine how much you can actually run for best performance results.
Theoretically the lift capability of a rotor can be compared to other rotors using the thrust coefficient divided by rotor solidity. This is calculated with the following formula
weight / ( density * # of blades * chord length * (rotor speed)^2 * (rotor radius)^3 )
So for Chris’ heli with a gross weight of 14.8, rotor speed of 1570 RPM, assumed blade chord of 76mm and rotor radius of 1580 mm, this comes to 0.0033. This is a non-dimensional value. For full size heli’s, they approximate the average blade angle of attack in radians by multiplying this value by 6. I haven’t found this to scale with RC heli’s. But if you wanted to run a 3 bladed version of his helicopter with the same rotor radius, the rotor speed would have to be 1280 RPM to have the same lift capability. The collective pitch would be different but they would be holding roughly the same average blade angle of attack.
Yeah, and then there’s further complications with going from a two-blade to three-blade rotor on the same helicopter. The engine will only run in a narrow band of rpm range, it runs at knee of its torque curve with the rotor at 1570. So that’s the minimum rpm it can run. So the three-blade rotor has way more theoretical thrust. But in reality it doesn’t have any more than the two-blade because the engine can only produce so much power. Which is totally used up by the two-blade rotor at 10.8 deg pitch. The three-blade will use it up at lower pitch angle. And it might possibly not actually lift as much as the two-blade because the three-blade rotor also produces more total drag than the two-blade.
In the end, the only way to take advantage of the three-blade rotor, to have the same possible cruise speed running at the same tip speed as the two-blade, is to put more power to the equation.
So this is just a way to compare rotors, there is obviously other factors. And I forgot to mention this only applies to hover. there are trade offs that have to be considered and if you would go from a two blade to a three bladed rotor you would have to make a decision on what you’re optimizing. So these are all great points. Just giving a way to compare average blade angle of attack between rotor systems.
The two main advantages I see with the three-blade is getting rid of the two-per-rev inherent in a two-blade rotor system. And it’s better for high altitude operation than a two-blade, assuming the power exists to drive it.
The main disadvantage is coming up with a suitable damping system for the landing gear. Three-blade is prone to ground resonance issues.
Chris and Bill,
you might remember that I put the original Align 3 blade head onto my TR700E about 3years ago. First I was very impressed with the lift of 3 blades.
Not getting into much of details, there were many problems to solve ( hot motor and ESC ) I upgraded those two, new problems, during tuning, difficult in windy condition and than crash on the ground because the scale blades are so flexible. In the end I took the 3 blade head off and replaced with the old 2 blades and I never looked back.
Fred, your experience echoes what I am experiencing with an experimental helicopter with a three-blade head. It takes more power to turn three blades even at the same takeoff weight. So the tendency is to run the rotor slower to get a handle on power consumption. And then stability suffers.
Reducing the rotor diameter of the three-blade vs a comparable two-blade is the best solution - or increasing the weight of the helicopter to be able to load the three-blade rotor properly to make it stable.