Hello,
Looking for some advice related to initial parameter set-up of a large HEXA X multi-copter using T-motor P80-100KV motors, Alpha 80A ESC and T-motor MF 3218 props.
I realize the Alpha ESC’s do not require calibration and the Throttle Range listed on the T-motor website is 1100-1940 so my assumption is the MOT-PWM_MIN, MOT_PWM_MAX could be updated with these values.
Using Mission Planner Helper I get the following initial parameters. Any comments related to these settings (and initial tuning in general) from others using similar set-ups / hardware would be much appreciated.
I have the T-motor Datalink and updated the Alpha ESC with the proper motor firmware. I could potentially use Datalink to capture real-time ESC data (e.g. RPM). Not sure how useful this is (in particular for the initial test flight), but if anyone has comments on this, it would be appreciated also.
thank you.
You may need MOT_THST_EXPO,0.60 if those Alpha ESCs try to do something with the “thrust linearization”
The 0.60 value is typical of those ESCs from what I’ve experienced, and the value of 0.78 is what you would use with almost any other ESC for those props.
The initial parameters calculator in MissionPlanner needs an update, I devised an updated formula for the calc of the expo given the prop size.
You will also be able to set these Harmonic Notch filter values as a starting point (also based roughly on prop size)
Hi Shawn
Thank you for the reply and detailed information, it’s much appreciated.
One basic question related to the spreadsheet, in column A there are different versions of Arducopter listed with various parameter settings under each version. Do those parameter updates listed under each Arducopter firmware version only pertain to that particular version? For example there are many parameter settings listed under Arducopter 4.0 to 4.1 but if I’m using 4.5 do those parameters updates also pertain to 4.5. I’m assuming they do, but just wanted to confirm.
I understand your comment related to MOT_THST_EXPO as that appears pretty specific to the Alpha ESC.
Before the initial test flight would you suggest updating the Harmonic Notch filter parameters you listed, I’m guessing it’s probably wise considering the prop size.
Hi Shawn,
Was just working through the parameters in a bit more detail in preparation for a test flight. There is one parameter (ATC_ACCEL_P_MAX) that changes percentage wise more than other parameters as a function of the increase in prop side. The default value I believe is 110,000 but a prop size of 32 inches drops the value to 19100. Just wanted to confirm this is acceptable as some other parameters might change by a factor of 2, but this one is more significant.
Thanks again for the help, and the work you and others do to support this effort.
Steve
Hi Shawn,
Sorry, a couple last questions if I may.
I noticed in the spreadsheet the comment that MOT_THST_EXPO of 0.6 has worked for the integrated ESC/motor series. My current set-up is not integrated – it’s separate ESC and motors. I know we’re working in the realm of many unknowns but wonder if you have any thoughts regarding EXPO for the non-integrated ESC’s/motors. I recently updated the ESC firmware to ensure all ESCs are using the most recent and same firmware.
Also been wondering a bit about the MOT_SPIN_MIN value to use for the initial test flight. It takes 5% throttle to spin the motors so I’ve set the MOT_SPIN_ARM to 7% and per ardupilot documentation the MOT_SPIN_MIN should then be set to 10%. However I’m a bit paranoid that value may be a bit low - any thoughts you have on that would be appreciated.
Hi @SLangton,
Did you have a successfull flight meanwhile?
I am setting up a similar large HEXA, a little bit smaller: 30" props, U8 Lite L 95 kV motors and ALPHA 60A ESCs, so not really far awy from yours.
I share your uncertainty regarding the MOT_THST_EXPO value because T-Motor does not say anything regarding this from their side (I asked their support but got no answer).
When I am using the motor test page to find out the motor range / dead zone, I can see that the motors start spinning at 18% throttle, when MOT_PWM_MIN is set to 1000.
When setting MOT_PWM_MIN to 1100 (as recommended for T-Motor Apha ESCs), the motors start spinning at 8% as expected.
Is there any difference / advantage in the engine control, when using MOT_PWM_MIN = 1100 and MOT_SPIN_ARM, MOT_SPIN_MIN based on the 8% dead zone compared to using MOT_PWM_MIN = 1000 and setting MOT_SPIN_ARM, MOT_SPIN_MIN based on the corresponding 18% dead zone?
I’ve always used these with Alpha ESCs , whether they are integrated or not, and had good results.
Some had other MOT_THST_EXPO values and when we set it back to 0.6 the tuning was able to be improved.
@xfacta all these values are already part of the ArduPilot methodic configurator . I will at some point autoset the values when the users select tmotor alpha in the component editor window.
Less guess-work for the users and less support questions for us. And … better flying vehicles for the smart-enough users that use the configurator.
Thanks. Are these recommendations the same for Alpha and Flame ESCs?
I am also setting up a drone that uses T-Motor “STAR 50A iESC”. These are intergrated ESCs coming with MN7005 motor sets e.g. in the “T-Drone M1000”, visible here: https://store.tmotor.com/bdimages/upload1/20190318/1552901604658857.jpg
There seem to be no specs available for these ESCs, but I assume, they are similar to the Flame ESCs (no FOC sine wave ESCs).
Hi @Hacky
The first flight went well; unfortunately have not done any formal tuning yet.
I largely used the parameter settings in Shawn’s spreadsheet. e.g. MOT_THST_EXPO, 0.6, MOT_PWM_MIN, 1100, MOT_PWM_MAX, 1940.
For the next flight I’ll update and try the ATC parameters Shawn mentioned in today’s post - I had used the default settings
For my setup it takes 5% throttle to spin the motors; I used MOT_SPIN_ARM,0.07 and MOT_SPIN_MIN,0.13. Used a slightly higher than recommended MOT_SPIN_MIN; I know there is risk of going too high also. Thanks
Not easily.
You would need to set up a thrust stand and all that entails… And that is only static thrust.
Best to just set MOT_THST_EXPO,0.6 for Apha ESCs and then test in-flight with ascents and descents.
set too high you can see instability at low throttle
set too low you can see instability at high throttle
T-Motor “STAR 50A iESC”
I’m not fully on-board (to put it mildly) with using unbranded/unknown ESCs without clear and proper specifications for an expensive build.
And I’ve never understood why T-Motor have both the Alpha and Flame ranges of ESCs - it’s like they come from two different companies - but surely not /s
I also think, “Flame” and “Alpha” are re-labeled products from different companies. But for me it is understandable that they want to diversify ESCs in different price ranges as the FOC sine wave ESCs are more complex and there are not many alternatives…
Regarding the “clear and proper specs”: Yes, the situation is not good but regarding the “STAR” ESC, it’s not worse than for Alpha and Flame. All of them lack of information and T-Motor also does not provide support regarding parameters like MOT_THST_EXPO in order to match their throttle linearization.
Hi Shawn @xfacta,
We communicated a few months ago regarding the parameter set-up of a large HEXA X described in this post (e.g. T-motor P80-100KV motors, Alpha 80A ESC and T-motor MF 3218 props).
Had to leave this project for a few months, but now hoping to do some tuning over the next week or two.
I’ve done a couple hover tests this week, and the craft is somewhat unstable, it’s pretty ‘twitchy’ in the roll and pitch axis. It can hover but any significant maneuvering might be risky. I’d like to ultimately use the VTOL quicktune LUA script, but probably need slightly better / stable performance before doing that.
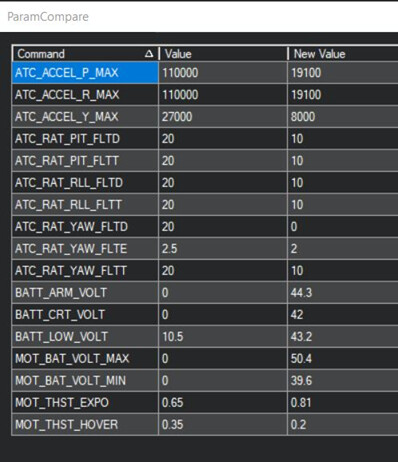
Was wondering if you could please quickly review the attached spreadsheet of key parameter settings similar to the spreadsheet you forwarded earlier in this post. The current settings are in the blue font and pink highlighted cells. Do you see anything concerning, and/or have suggestions I could test to improve stability a bit?
{kind=link}