Home
Blog
Stores
Docs
Copter
Plane
Rover
Sub
ArduPilot Discourse
T-Motor MN2806 KV650 with Arducopter 4.2.x
ArduCopter
Copter 4.2
motor
Jai.GAY
(Jai GAY)
August 25, 2022, 6:52am
15
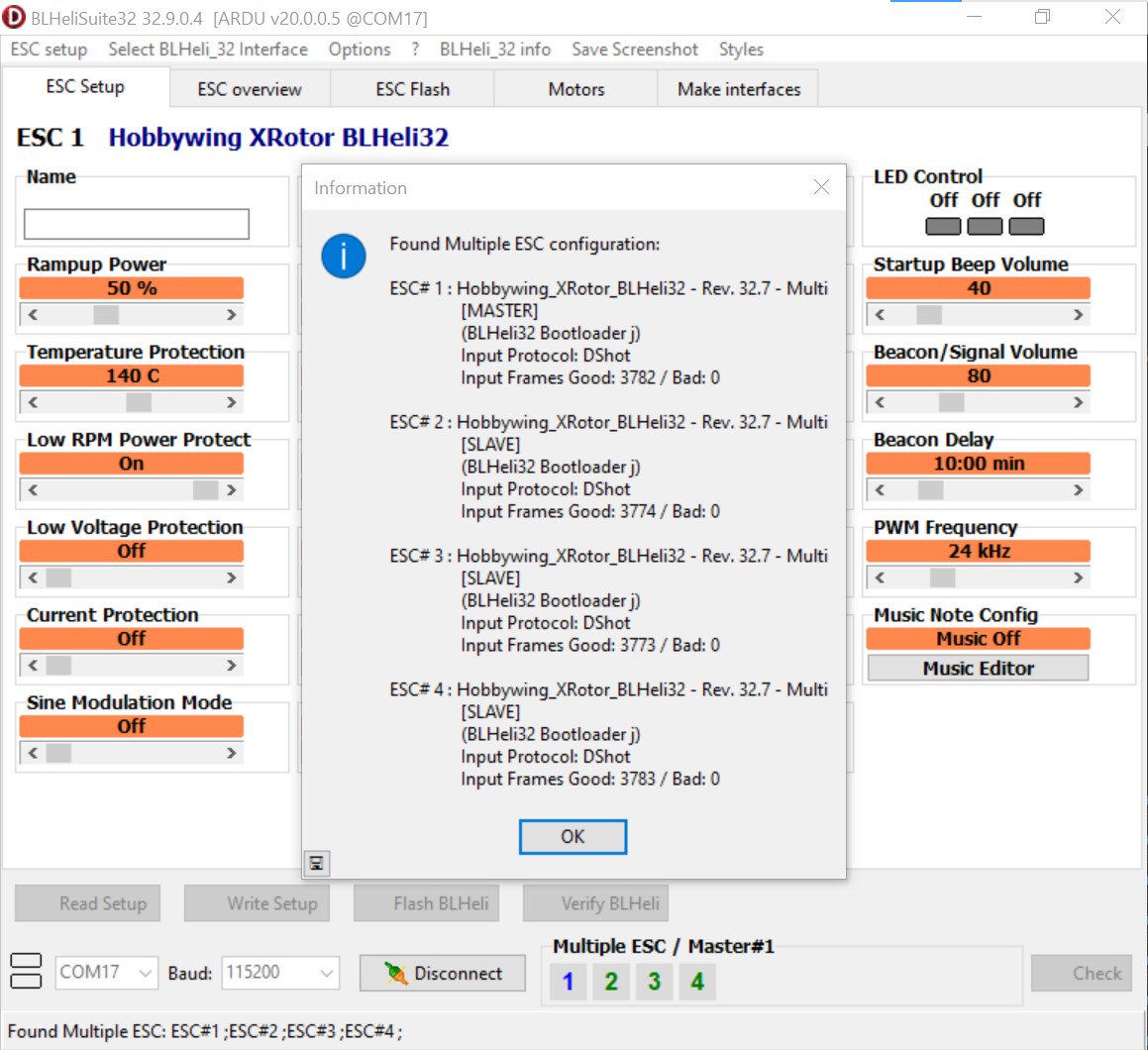
Set SERVO_BLH_AUTO = 1
safety switch ensures it is pushed
done. turned off Low RPM Power Protect
connection_okay
1159×1060 206 KB
Thrust lost on motor 2 caused crash
show post in topic