My Synergy E5S 626 long range electric UAV helicopter has completed it’s initital flight testing. It is flying custom firmware in a Pixhawk. Instead of using the common power modules, which don’t work all that well in high-voltage helicopters, I am using Castle Link Live telemetry to the RC radio for power system monitoring and logging. I had thought about incorporating the Castle Link Live into the ground station. However, at this time I decided to use it only with the RC radio as I sometimes fly autonomous flights without the ground station present. I may eventually incorporate the power system telemetry data into the ground station but that will require some significant modifications since I am using watts and watt-hours to measure power consumption and fuel remaining, instead of amps and amp-hours. Amps and amp-hours is not linear as battery voltage sags during discharge. Watts and watt-hours is, and provides a better measurement of power and energy for long flight time UAV’s.
On the endurance test this helicopter flew for 28.5 minutes with 5% reserve carrying 1kg payload with two 3300 55C 12S batteries. On this test flight I had my channel 6 option set up to change the WPNAV speed to determine best efficiency cruise speed, which turned out to be be 15.5 m/s.
On this morning’s test flight with two 20C 5000 12S batteries it flew for 41 minutes with 1kg payload @ 15m/s on a longer 1.6km test flight course. The 1.6km test course has level cruise flight sections, flying crosswind, upwind and downwind, with addtional sections that vary altitude to measure performance in cruise climb and descent.
Measured power consumption in level cruise with this helicopter is 620 watts @ 15m/s and 6.6kg takeoff weight @ 1,650 rpm headspeed. It had a maximum tested range of 37km with 1kg payload in that configuration, flying a combination of level cruise and climb/descent typical with following terrain elevation on autonomous flights.
I have to modify the ESC cooling system in the heli. My ESC temp got to 72C on this morning’s test flight. I am going to design a cooling duct that pulls outside air from the nose and routes it over the HV120 ESC to reduce its operating temperature in cruise flight. The high operating temp of the ESC is not due to load, but duty cycle and the fact that it is in still air under the canopy. I could install an electric cooling fan on it, which would provide for cooler operation in hover as well as cruise. However I will experiment with ducted air-cooling first, since we have plenty of airflow over the helicopter in cruise flight to work with for cooling, and hovering is not what this helicopter is intended for.
The powertrain configuration is a Scorpion HKIII-4035-530Kv 3.4kW (4.4kW 5 sec), Castle Edge HV120 speed controller with governor, logging and telemetry, 9.971:1 main gear ratio, tail ratio 4.5:1, Rail 626 mains, Rail 96 tail blades.
Battery configurations, depending on flight time needs, can be:
- Single 3300 12S (147Wh) providing 14 minutes cruise flight time with 3 minutes reserve
- Single 5000 12S (222Wh) providing 21.5 minutes cruise flight time with 3 minutes reserve
- Twin 3300 12S (294Wh) providing 25.5 minutes cruise flight time with 3 min reserve
- Twin 5000 12S (444Wh) providing 40 minutes cruise flight time with 3 min reserve
CG is adjustable for all battery configurations with 1kg payload. Note the helicopter has higher cruise flight power consumption with the twin battery configurations. Lighter payload will increase flight time accordingly. A typical MAPPIR/GoPro camera and mount is about .25kg. Power consumption goes up or down in cruise flight at about 90watts/kg of payload weight
This is the small version of a high-performance electric dedicated UAV helicopter platform I am developing for Synergy Helicopters with the help of Matt (and Amy) Botos, the owners of the company. The larger version is a Synergy 766 UAV (coming soon). These helicopters have grease ports to grease the bearings, tail transmission that is independent of the tail boom and provides for 2 custom gearing options on the tail drive, selections of three different blade sizes for each model, 8 main transmission gearing options to accomodate different drives, headspeeds, operating voltage and blade configurations, and several other maintenance features that allow them to fly 50hr inspection and 300 hour overhaul and bearing replacement interval.
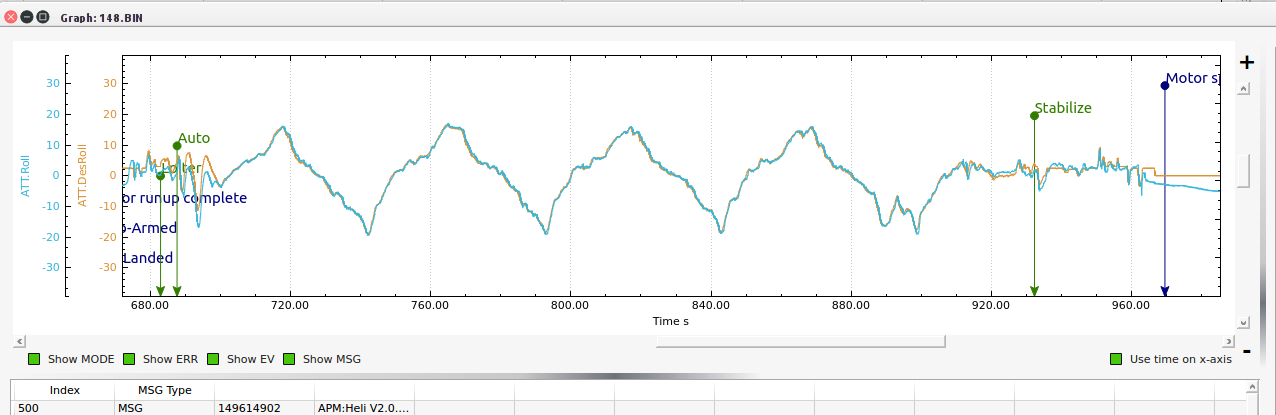
They are also very smooth-running and quiet machines. The Pixhawk on this one is mounted to the side of the frame with just two 3M round tissue tapes with no other vibration isolation whatsoever. Below is a video of the maiden auto test flight, and below the video is a plot of Attitude Roll desired vs actual to show well it tracks attitude in cruise flight once the dynamic flight rate integrator leak is turned off. There is no downstream FBL unit used, or needed.

{kind=link}