I think it depends on a couple of things. Does the gps also have a magnetometer? If so then you want to keep it away from metal. Then u want to make sure the gps has a clear view of sky. I think the tail boom is a common place to get it away from the main rotor and give better view of sky. I think those are the considerations. I may not be the best source of information for this.

Pitt,
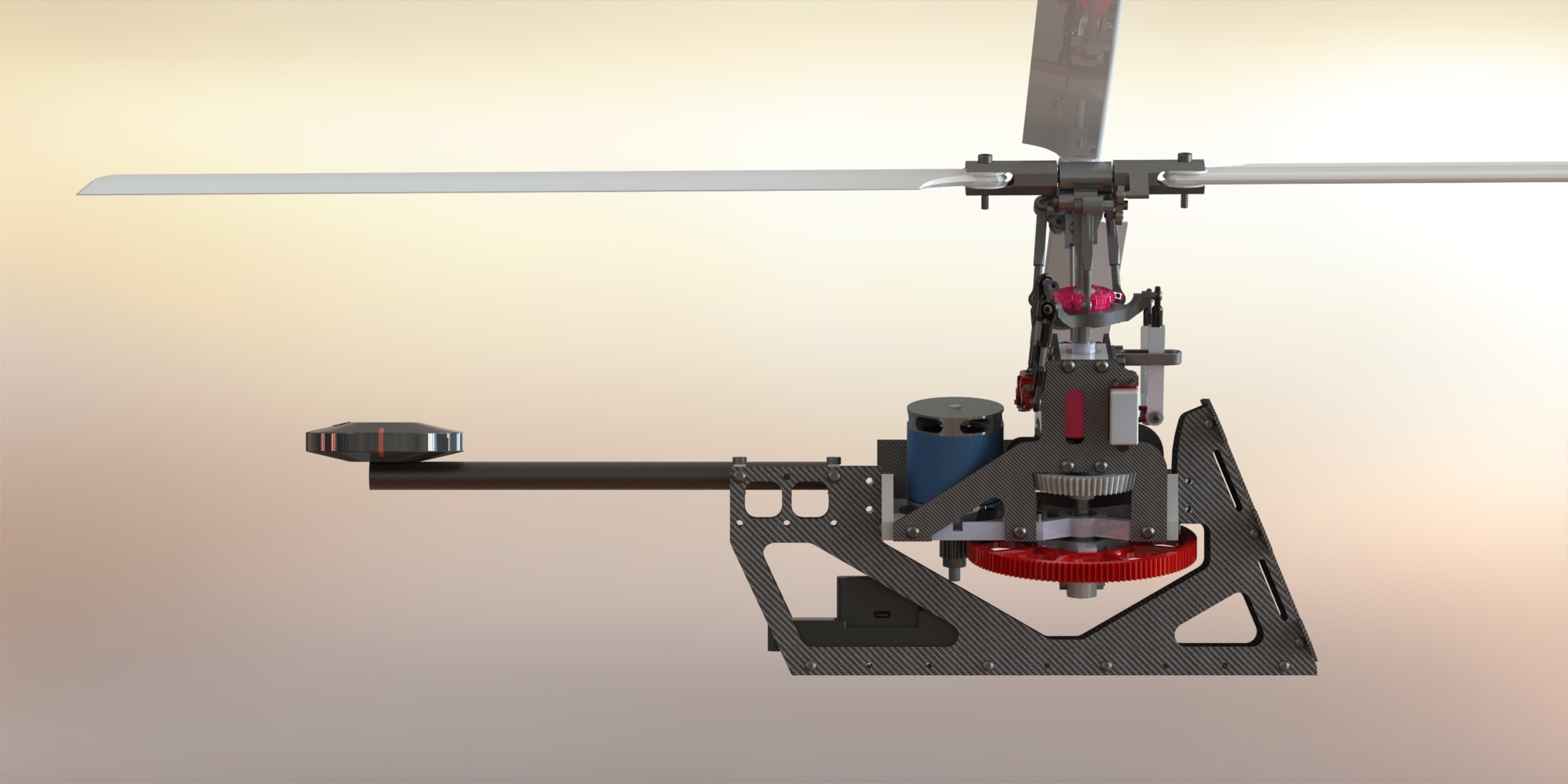
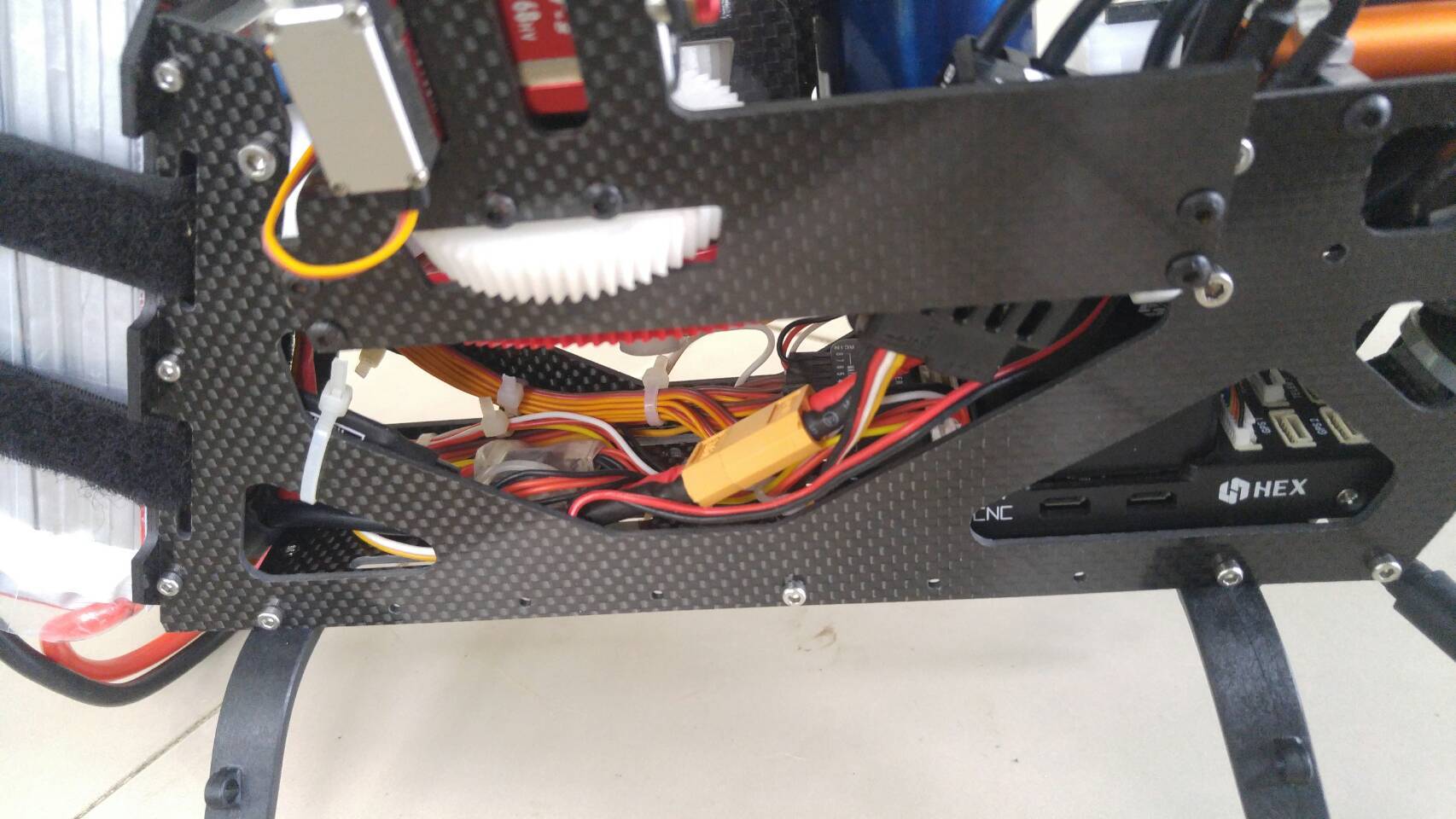
Nice clean, tightly packed design. I like how tightly packed the upper frame is. I do have some concern with how the upper and lower frames are connected. The attachment points are not spread that far apart in the vertical axis. There is large distance along the longitudinal axis and a pretty good spread laterally. My concern with the vertical spread for the vertical axis is that the lateral swinging of the lower frame would cause vibrations in the pixhawk.
Thanks for pointing that out, I wasn’t aware of that at all.
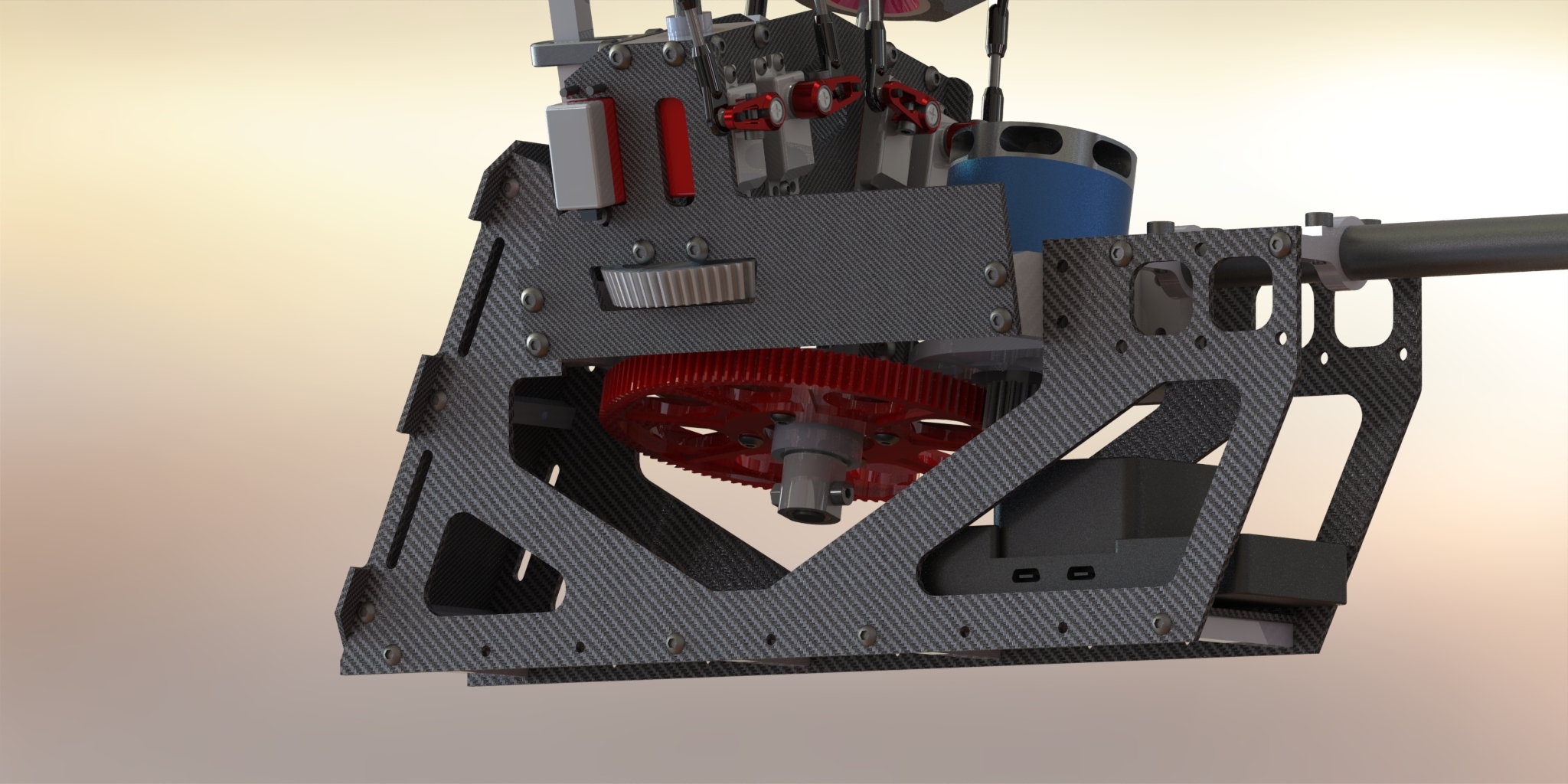
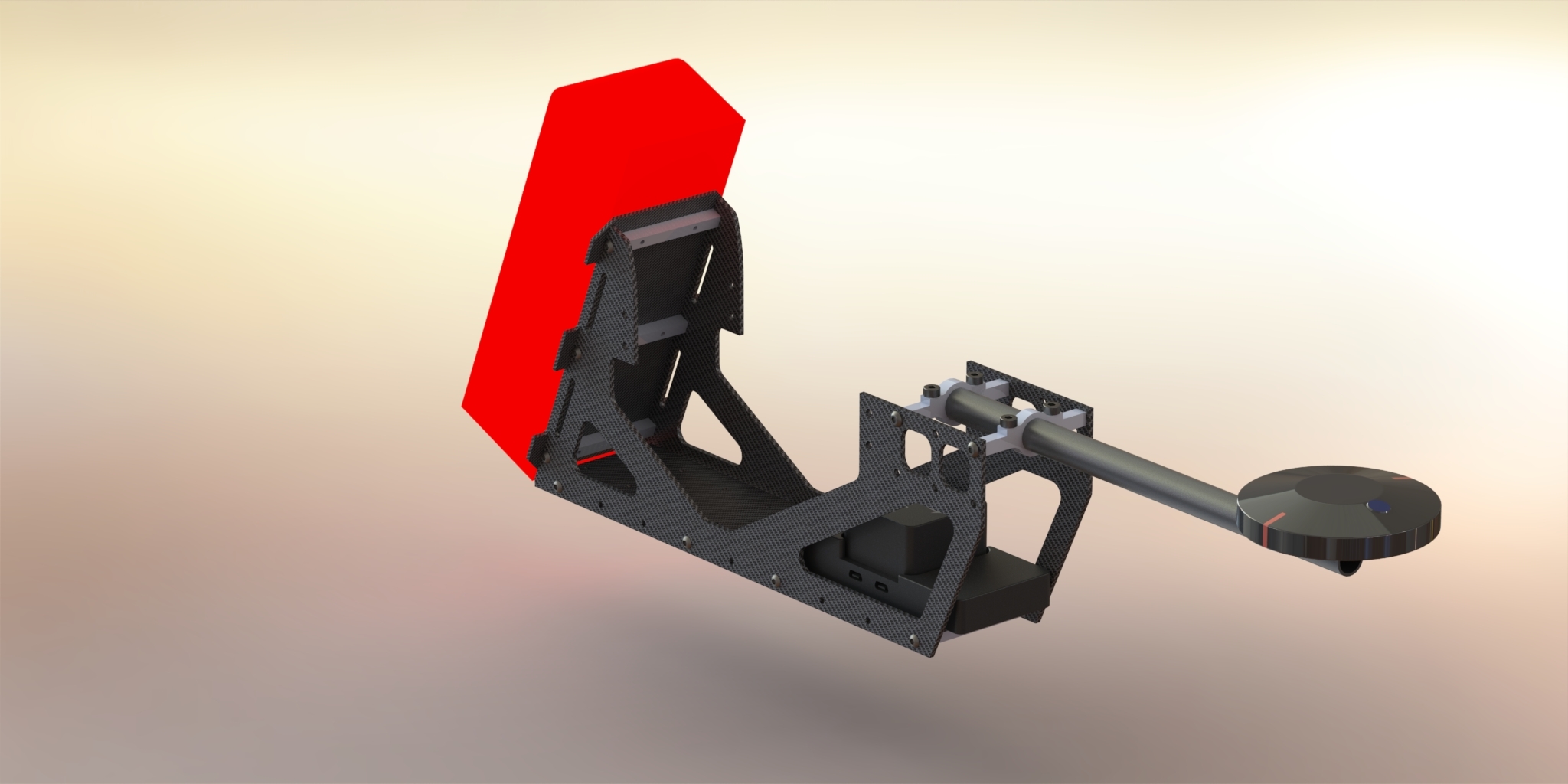
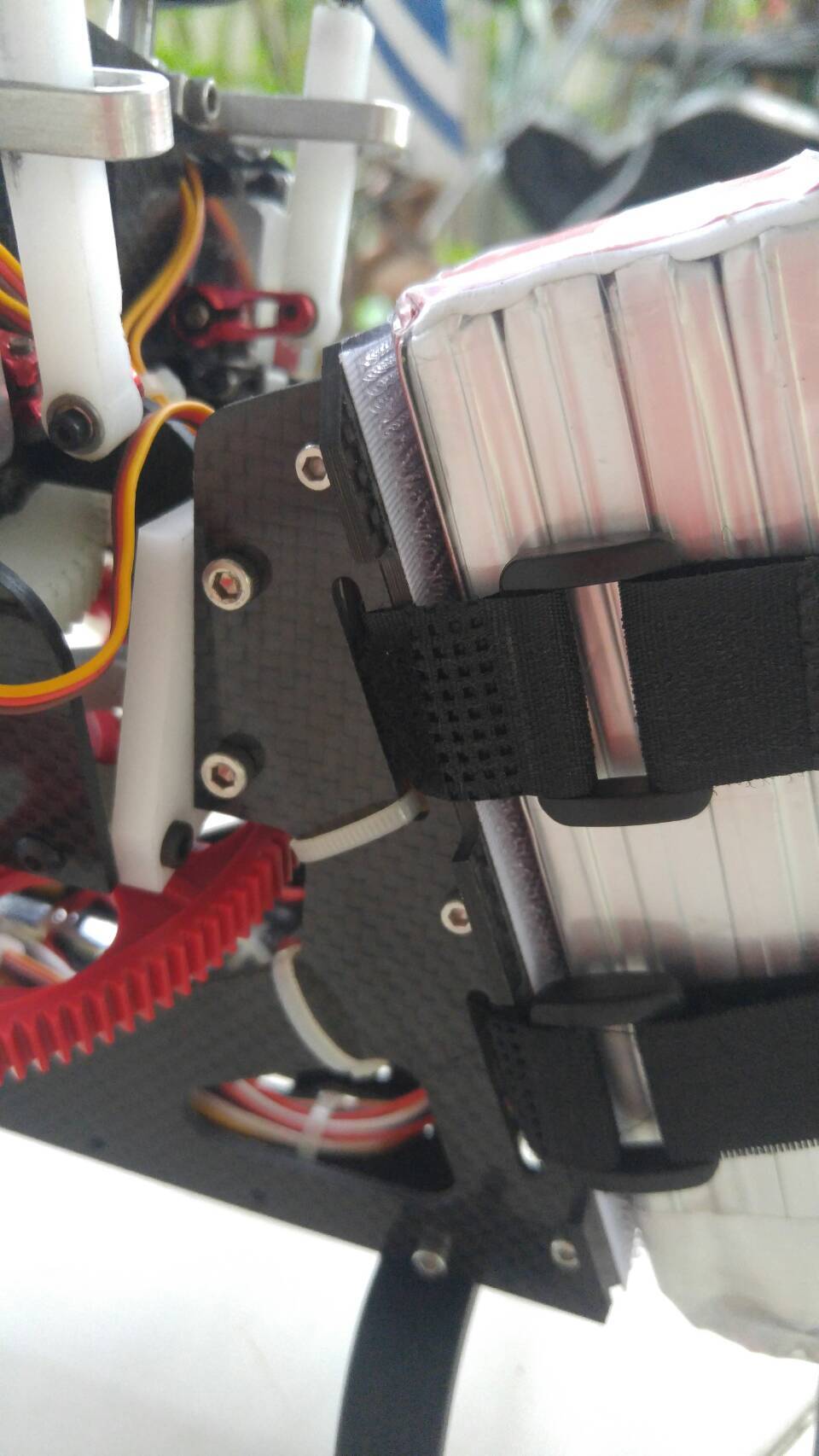
Here is the revised design:
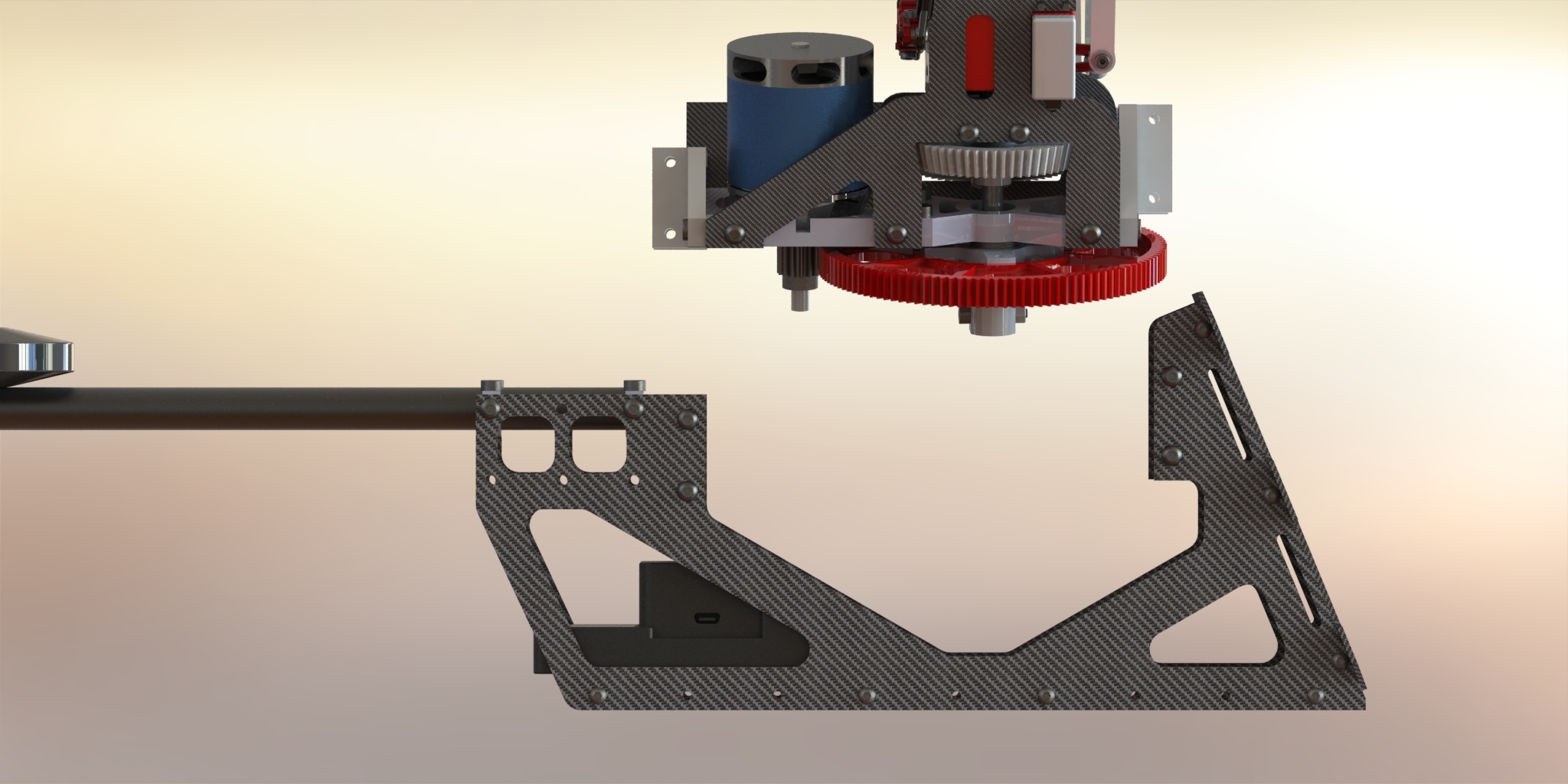
The screw holes distances have almost doubled
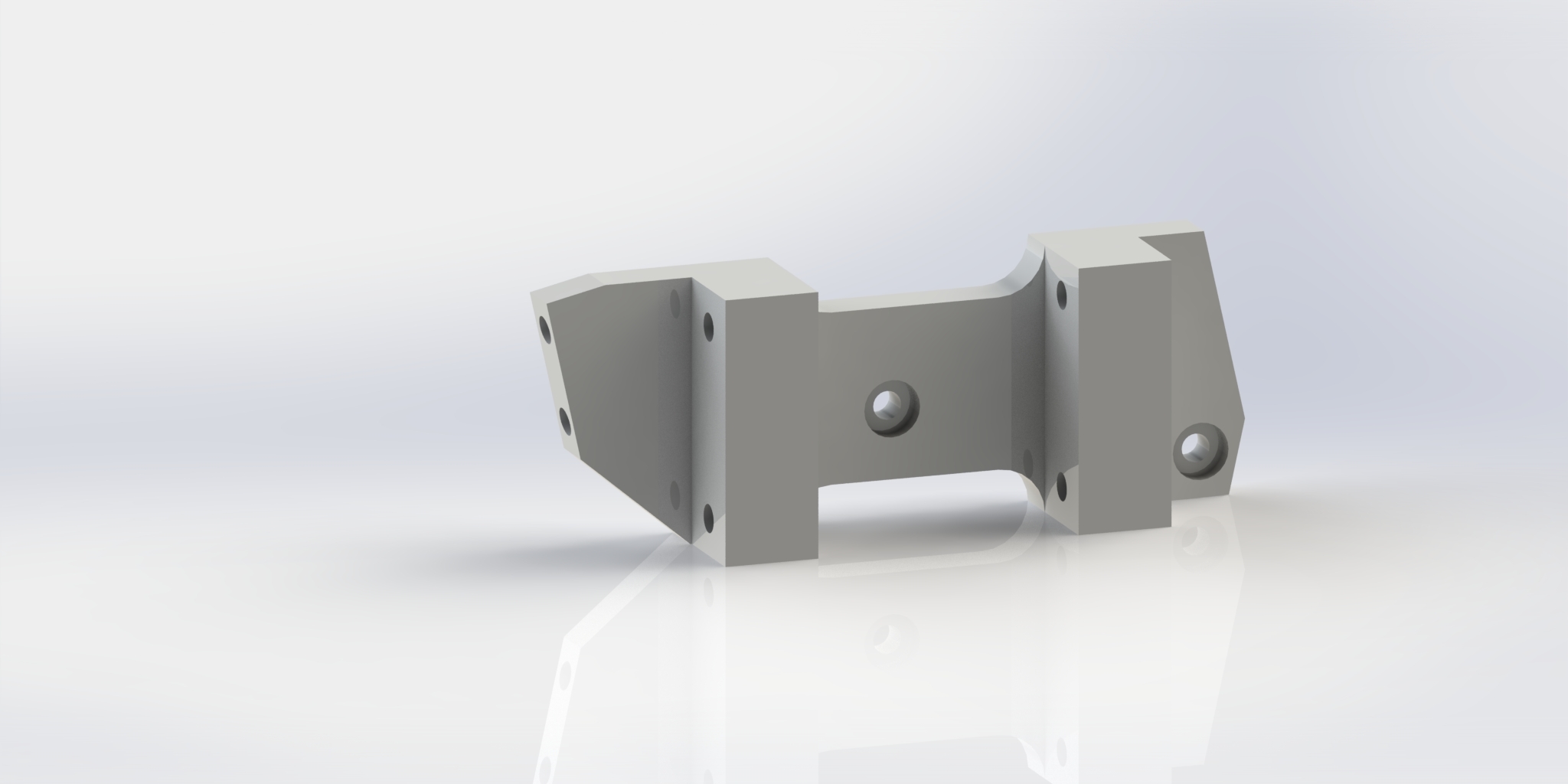
This is one of the two parts that connect between upper-frame and lower-frame.
Do you think I should use aluminium? It was made of POM (Poly-oxy-methylene, Acetal, Delrin-like) to reduce weight, cost, cutting time, crash damage, and probably vibration.
Pitt,
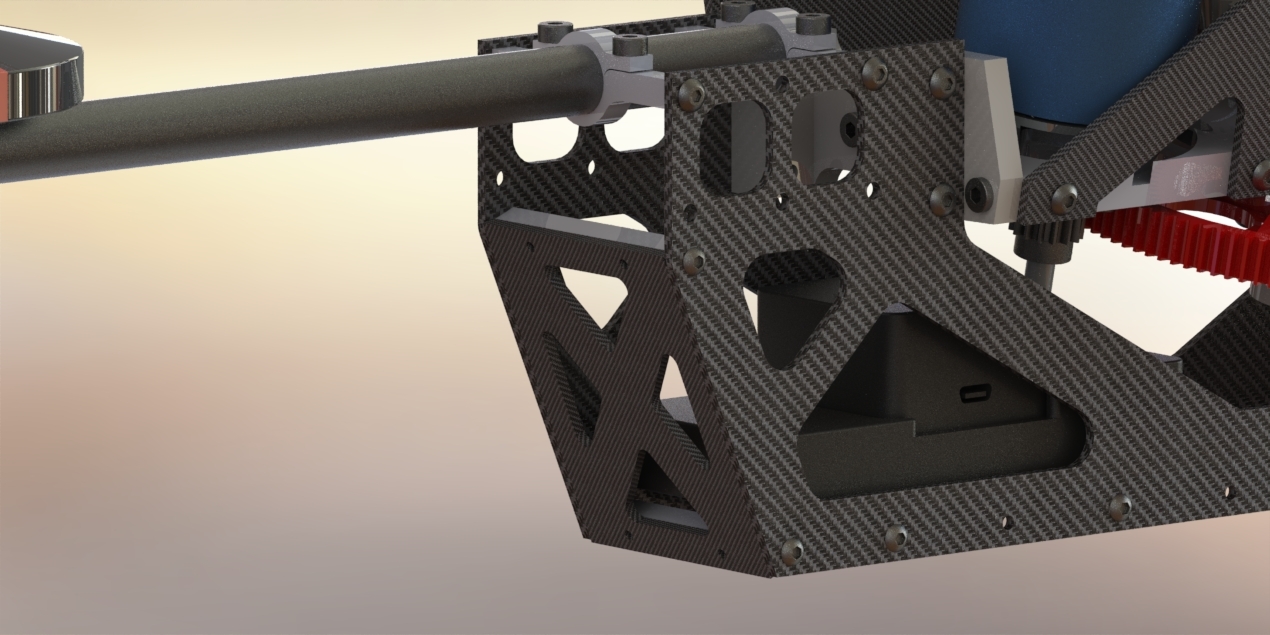
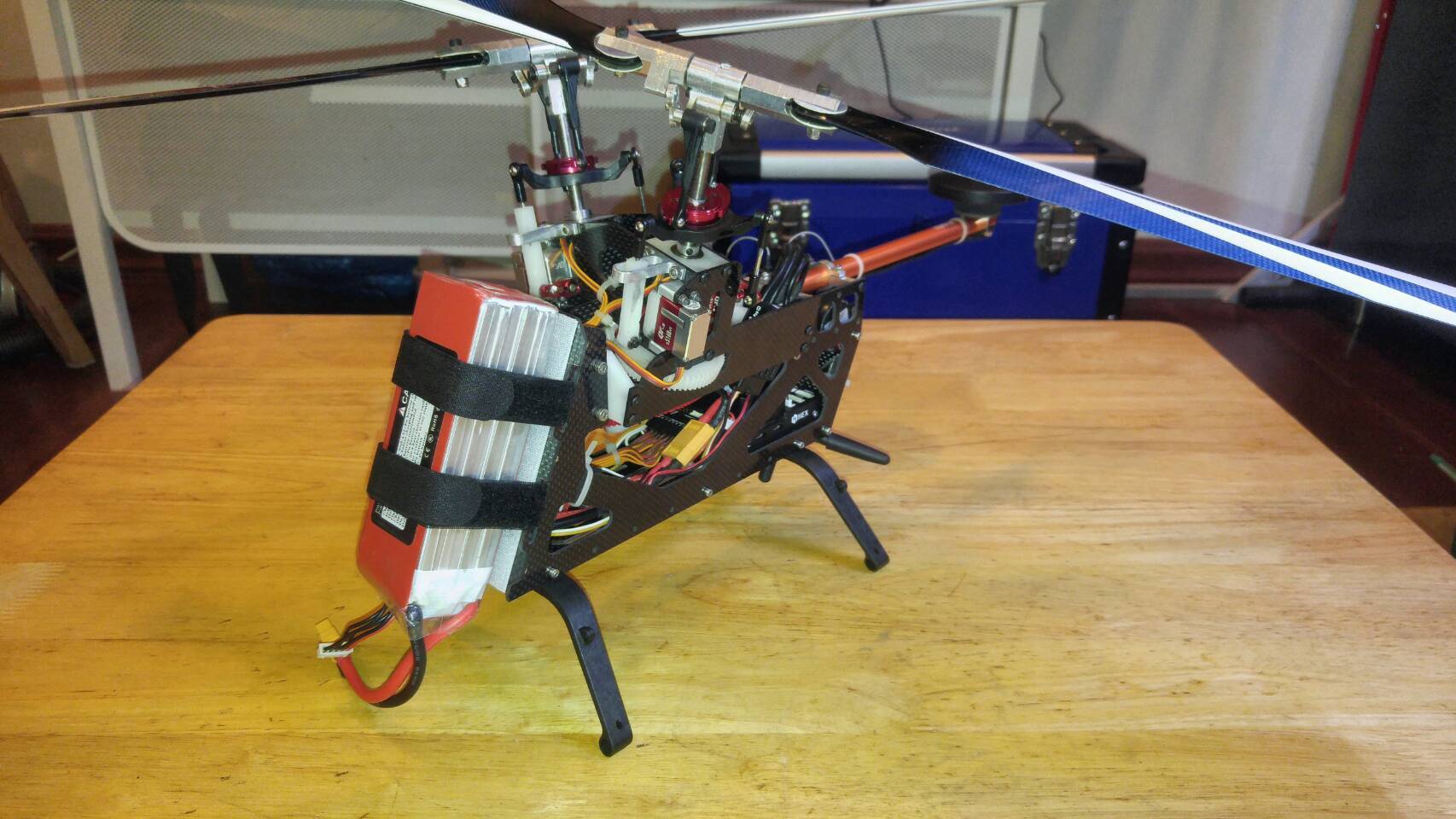
That looks better. I think that piece will be fine using the printed material. So in the front lower piece it looks like there is a bulkhead that the battery mounts against. I still think there can be some swinging if the lower frame in back by pixhawk. I might suggest a bulkhead in the back that would help stiffen up that lower frame. It doesn’t have to be a solid piece, just some way of stiffening the lower frame from swinging. Triangular pieces glued in the corners?
Yes. Very much so. Nicely done




Pitt,
Wow! Looks great!! That was quick.
What amount of payload do you think it can handle?
FYI
With old frame: 2.1 kg with 4S 5400mAh at ~1800RPM it can hover 12mins (3.78 V left)
This new frame will be slightly heavier and I will raise RPM a little since with Cube at new location, the vibration reading halved.
And maybe double the battery (will switch to 6S if I can find motor with lower kv, now using 3026 1400kv)
With my little experience, I guess 500g is the heaviest payload to still fly OK. I really wish it can lift better camera than GoPros. 
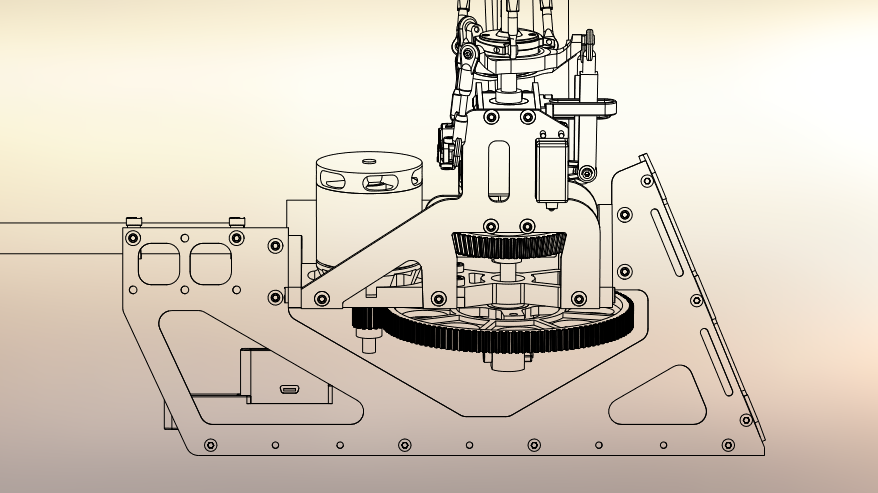
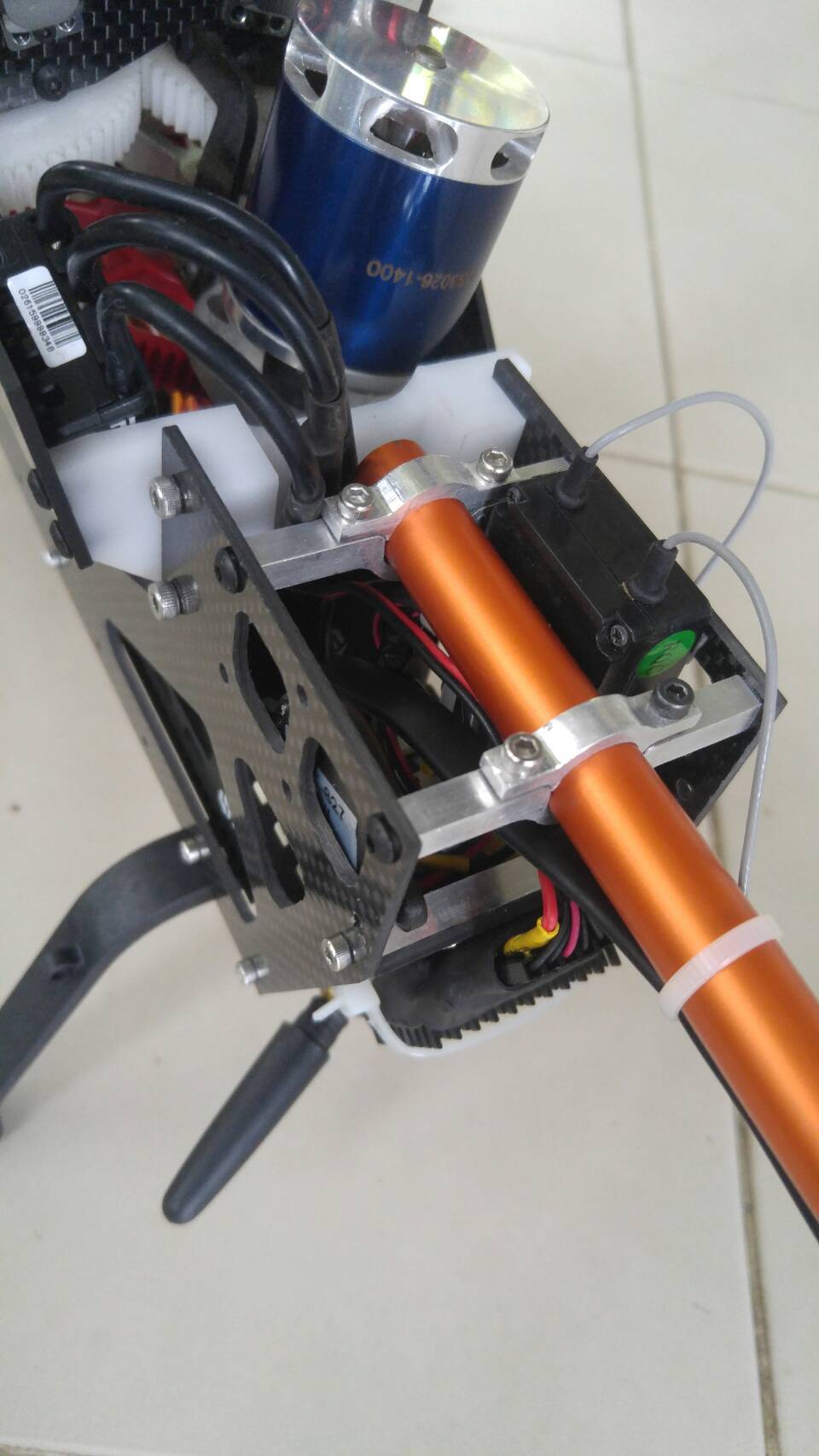
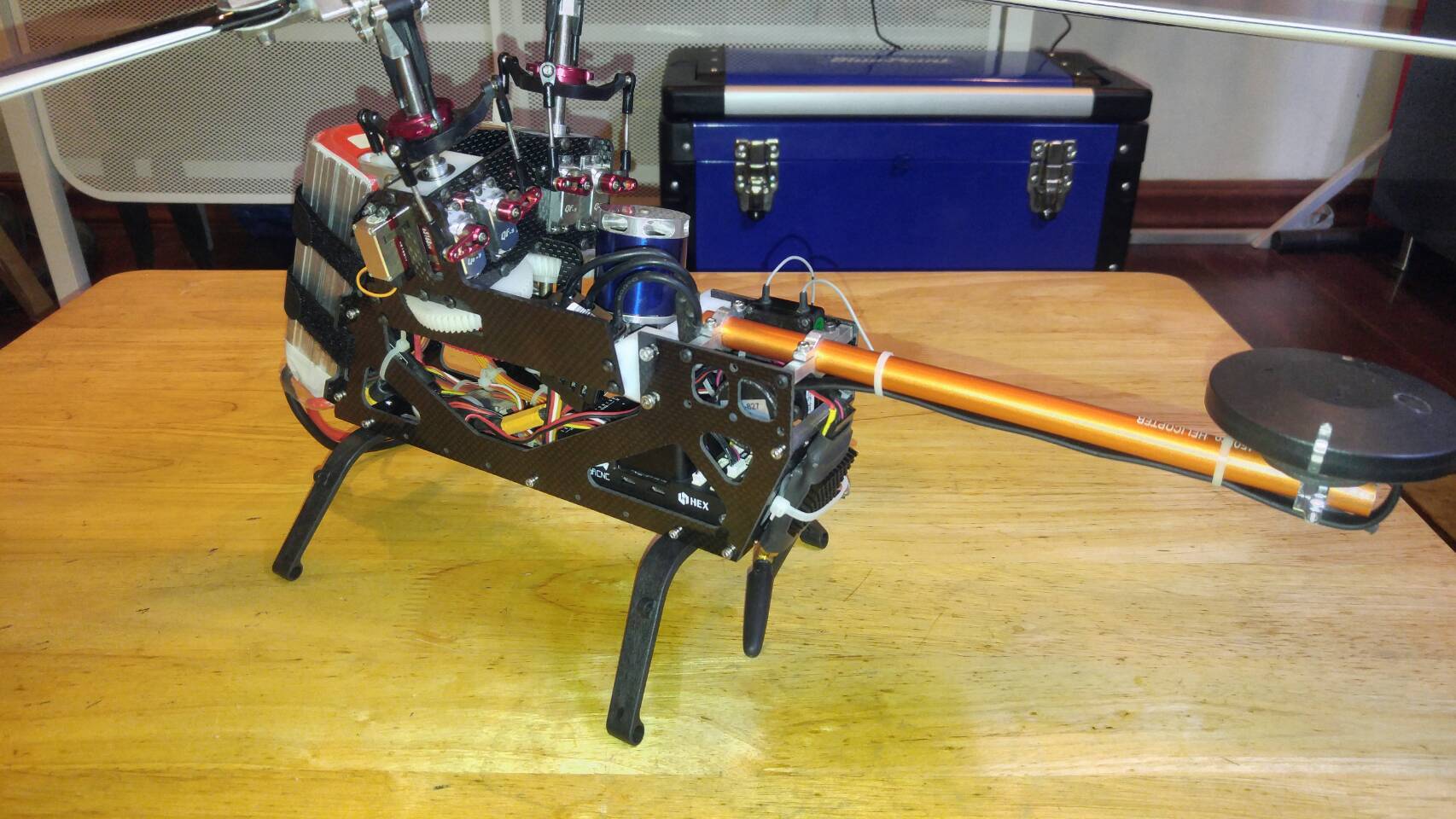
Edit: add some.more pics
Test flight was a success! 
Vibe: Zero clipping
Increased head speed from 80% to 90% (using radio endpoints): still zero clipping!
Still couldn’t get yaw to feel anywhere near solid however 
Log: https://www.dropbox.com/s/cvak5pg9lfufgd0/2017-05-25%2018-16-41.bin?dl=0
No more worry about vibration
But I had to adjust gains a little due to different mass distribution (lower pitch gains, higher Roll gains)
Just popping in to say that this is such a cool project. What size is it?
It’s spinning 380mm blades.
Motor and ESC are equivalent to 500-size (ALIGN standard)
3026 1400kv motor + 60A ESC
Not sure what size it is 
Pitt,
I could do a performance analysis but I need some data. I think you could do it using Chris’ method as well and might end up with similar results. I think he uses something like no higher than 5.5 deg collective as the stopping point for hover collective. So keep putting weight on the frame until you reach about 5.5 deg collective. I never took the time to determine my hover collective on the original 2 bladed version of the X-3. I just know that I was seeing settling with power when coming into a hover from forward flight. I had to go full collective in some cases to keep it from hitting the ground. Now that I have a 4 bladed rotor system, I don’t see that issue. but I spent time looking at the trade off between rotor radius, rotor speed and number of blades while trying not to increase hover power required.
As for the recent log you posted, you have some oscillatory frequency lurking in the data. It isn’t being fed back into the system at this point but I think with higher P gains you would see it. Based on what I saw with Chris’ tuning, you may try turning up your I gain more and see how it behaves. The target and actual pitch and roll attitudes seem to be tracking fairly well. As long as you don’t intend to use acro mode, it might make it handle better in stabilize.
I gain up to 0.500 without any ill effect. Not sure if I need this much.
I also increased head speed another 10%
I have to turn down P gain a little lower and the first time I notice the effect of D gain.
Also just found that I left notch filters off. Do I need to determine the frequency again before using it?
Yeah, 0.5 I gain sounds a little high. What does the response feel like? Did you ever play with the integrator leak rate value?
Yes you do need to determine the oscillation freq again. It may be different for this frame.
Do you mean ILMI?
I left it at 0.1 since It makes the heli holds better but higher ILMI makes taking off too exciting.
No, in the code there is a hard coded parameter that changes the rate for the leak of the integrator.
https://github.com/bnsgeyer/ardupilot/commit/cb2cd0320575b2cac348be6c9cbc62e8ec273533
Here’s the commit that adds the leak rate as a parameter.
I wasn’t aware of that at all.
Will give it a try tomorrow.
About I gain, I don’t feel any different when increasing it. I’m not sure if it shows in the log because I changed TUNE after it started logging but every spool up got about 0.060 increase in I gain.