Anyone using SWMAPs and have some tips for getting polygons into Mission Planner?
My goal would be to roam in our 4 wheeler with RTK GPS using SWMAPs and lay out a perimeter. Then, import it into Mission Planner as a perimeter polygon to be autofilled with Grid2 as a mowplan.
In the planning page, right click on the map. In the menu look for Map Tools >> KML overlay. Then you can use that to draw the polygon on top of the overlay.
I think I need to reference som survey pins to move forward - non alignment of the sat maps seem to be precision related to my SwMaps and the GPS radio.
Can’t get rtk at all, and dgps isn’t enough precision.
I have a note into ardusimple and will post again when I have something to report.
I don’t think I could help much. I am struggling to understand how the SWMaps application interfaces with Mission Planner. I can understand creating a KML file in SWMaps and importing to Mission Planner as an overlay, but I don’t understand what you are trying to do and it is probably due the fact that I don’t have any experience with manipulating map systems. I am however interested in learning about what you are doing…
No idea what you’re trying to do there. None of that appears to be connected to a vehicle. It simply shows that corrections do indeed exist for that address.
Maybe I just don’t understand the workflow. Here’s what I’m doing:
Capture perimeter waypoints (with mower, marking waypoints as I drive it around in Manual)
Edit the waypoint file and create a polygon file of the perimeter (working, but there may be something easier)
Identify tree locations
a. by picking the centroid of a tree based on the googlemaps imagery (pecan trees aren’t symmetrical about the trunk)
b. by using an imported shpfile from SWMaps
Create circular fences, write to vehicle
Create a mowplan (Grid)
Execute the mowplan
I have ~6 acres with 11 trees I’d like to avoid while mowing
The goal is for my mower to avoid circular fences (around my trees) without having to mark a ton of waypoints, manually, around every tree. Just a straight back/forth grid, with the mower avoiding the fences.
Getting SWMaps to give me RTK accuracy (and therefore my fence/tree centers) has been elusive. I get DGPS accuracy just fine, but no RTK. I wonder if my GPS radio isn’t receiving the corrections…hmmm
Anyway, would like to hang my radio, battery, phone off a pole with the GPS antenna on top and do some rough (<1ft accuracy) surveys of the trees and use the fence function. At this point, I might just purchase the Ardusimple RTK stick - was hoping to use gear I had laying around.
@Yuri_Rage - to your point, SWMaps is NOT connected to a vehicle. Only used to collect the tree trunk positions. I did drive my mower around the trees to figure out the centroid position, but ran into a tree with the mower (not by much). No damage (except ego). Regardless, was different enough from the tree shadow/canopy that I couldn’t rely on it.
@SJohnson - I’ll document my setup a bit more and keep you in the loop. We can trade notes at MowStock - right now I’m planning on going, but its a busy time at work. Where are you staying? DM me and let’s sync.
I have found that the easiest way for me to mark trees is to mark 4 simple points (one each side of the tree). I know my mower measures waypoints referenced at the center of the mower in-line with the rear tires. Knowing this, I pull up along side the tree, align my rear tires with the tree, and drop a waypoint. I do this on each side and then download the points to Mission Planner. I never trust a map to tell me the exact location of anything!
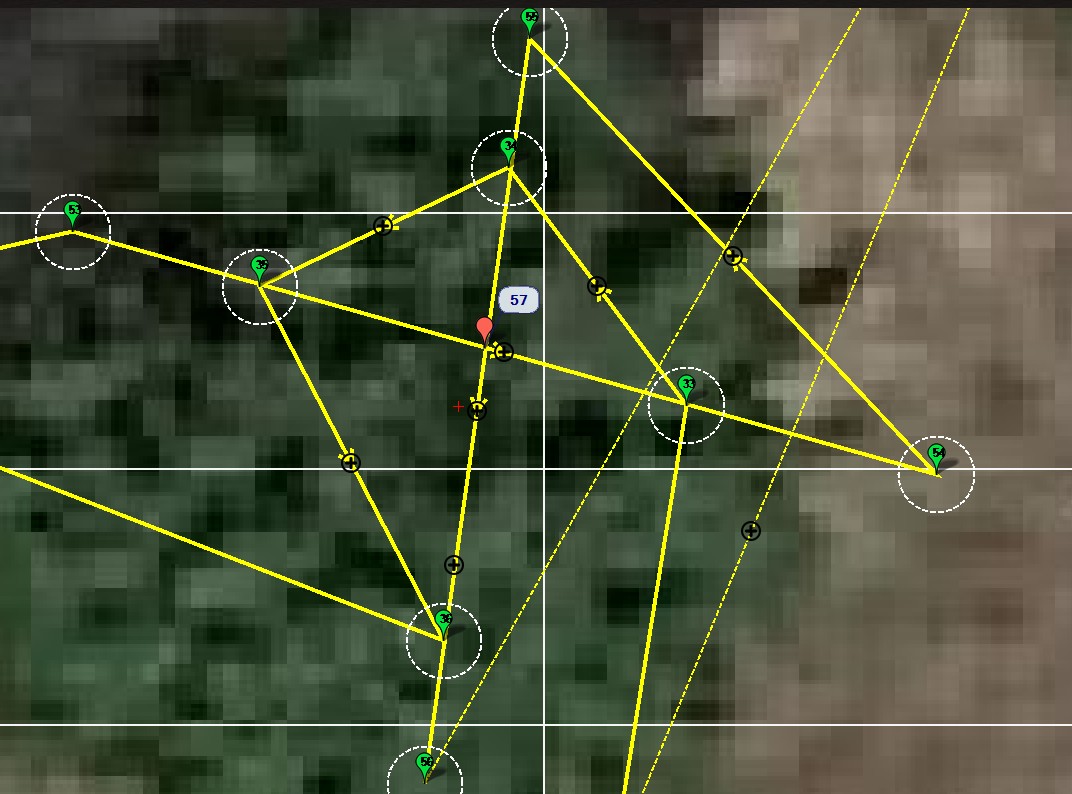
After I determine where the tree is located, I insert a DO_SET_ROI WP right on the crossing point of my construction lines. The ROI WP gets displayed in red and I use it (bottom tip of the tear drop) as the center location of the tree. I always worry about how accurate any WPs taken under a tree are located, but I have found this technique to work very well for me with my trees.
I then save the ROI points and add them to the file where I build the overall mowing plan.
I this case I find the Auto WP – Create WP Circle command to be very helpful.
This tree is located right in the center of this circular drive (I know because I planted it there). Notice how much the map is offset from reality. The moral of this story is to measure things you want to know with any precision.
Another very important point is to be careful how you approach a way point close to an obstacle like a tree. It you drive straight at a waypoint that is 1m from a tree and is inline with the tree, the mower will probably hit the tree. The front of the mower sticks way out beyond where the waypoint will be measured back between the rear tires. If you approach the waypoint from the side not inline with the tree you have more clearance.
I have hit a large number of trees and fences before I finally got my mission planning techniques developed enough so I don’t hit things. I unfortunately have a great many obstacles.
I will be glad to show you some of my mowing plans.
Steve - I’ll attempt your workflow in about a week (really muddy right now). I’ve done something similiar with ok results, and with my mower getting too close. Thanks a ton for the illustrated photos and comments.
Yuri - would it be possible to create my own georeferenced photo with my drone rather than use google/apple/bing photos? I did this a few years ago for some fences we were putting in - measured them this morning with DGPS/SWmaps and it was quite accurate.
Ok guys - take a break from my thread - I’ll do some testing and reach back - thanks, as always for the input/education…
Yes. It’s called photogrammetry. You’d want to use the same RTCM3 source when creating that map as you would for mowing. There are plenty of resources on the AP wiki and this forum.
But I think you’d be best served just marking coordinates with a physical measurement using RTK GPS. Pointing and clicking on an image will almost always induce error.