Hi… So I have two drones with same pikshawk microcontroller nad same radio telemetry when I connect them both in swarm I cannont arm any single one of it… But if i try to fly a single drone it can be easily done. The swarming of two drones is not working or I am doing the wrong way… Kindly help plz…
Kindly explain the steps you took to connect and arm both swarm vehicles.
1 Like
In case it helps, we’ve got information here on the wiki re flying multiple vehicles.
1 Like
So basically I am using the swarm feature of the Mission plannar. First I connect the leader with the mission planner with the help of a telemetry. Now I plug in the telemetry of the 2nd drone. (Just swarming two drones only). But the 2nd drone doesnot come up on the Mission plannars screen. Maybe i dont know how to connect it to the app. Therefore I press Ctrl +F which shows me a big window with many features. I click on “Follow the leader”. Now in this block i have a command called “Connect the mavs”. I connect them both. I see them on my Map… but now nothings happens. I cant arm them. Therefore they cant take off…
OK, maybe you haven’t connected to the 2nd vehicle. You’ll need to right-mouse-button click around the location below and select “Connection Options”.
Ok so when ever i try to do this it just shows me a single drone to connect. Does using a radio telemetry with the same frequency for both the drones causes a problem is connection???
Depending on the telemetry you use, you might encounter issues. Did you set the net id for the telemetry on the two copters differently? If they are the same, you may experience issues. You may also want to separate the frequencies (e.g. vehicle 1: 900-915mhz, vehicle 2: 915-930mhz) I have had success flying 3 copters with 3 pairs of the same model telemetry reliably with this configuration.
Additionally, did you set the system IDs of the two copters differently? Different system IDs are required for the GCS to recognize them as different aircraft.
1 Like
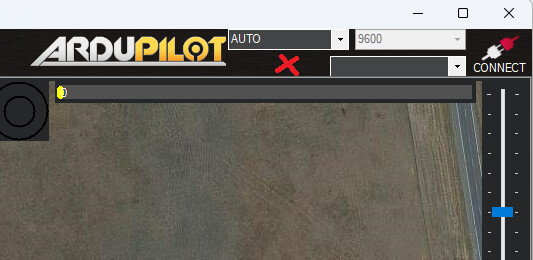
The swarm functionality provided by Ardupilot and MissionPlanner works pretty well. I’ve attached an example of my use below.


I hope your swarm flight is successful.
Plz plz plz can u email me a detailed video with this swarm details that howw u set the id and how you managed to connect and swarm them my email samyeearif@gmail.com…
Plz help…
Plz plz plz can u email me a detailed video with this swarm details that howw u set the id and how you managed to connect and swarm them my email samyeearif@gmail.com…
Plz help…
Unfortunately, it was more than a year ago, so I’m not sure of my memory. I also didn’t take a video of the connection guide, but if I remember correctly…
First, connect the first copter to the GCS. This is the same as the normal connection process.
Next, once the first copter is connected, right-click on it.
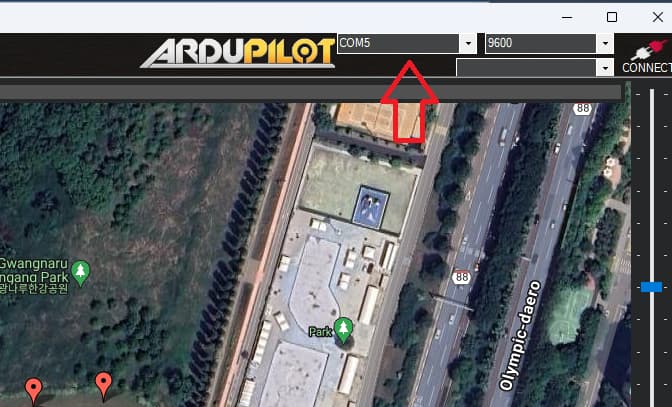
And then click on the connection options
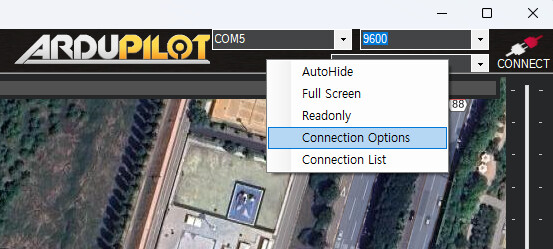
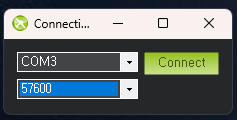
A window like this will pop up, and you can connect the second copter in that window.
Before you do this, you may need to set the frequency separation and net ID differently if you are using the same model of telemetry. You can find the instructions on the following page.
For the system id, if I remember correctly, it’s the SYSID_THISMAV parameter. Set a non-overlapping number for each copter, but avoid 255. This is because 255 is the id of the GCS.
Once the two copters are connected to the GCS, you can switch on the swarm window to start the swarm.
1 Like
And the example Mission Planner screen shown above is a modification I made to make it easier to run multiple MAVs. Don’t worry if you have multiple copters connected and it doesn’t look like the screen above.
1 Like
Thank you soo much i followed your advise and i finally have two drones connected to my mission planner. But when i press control+F i have a window that shows many buttons I choose swarm from those button I see both the drones and seperate them with some distance. Now i dont know what i have to do next when I press arm(exel leader) a single drone gets armed. Kindly plz help me what i should do next for a successful autonomous flight…
2 Likes
Thank you soo much i followed your advise and i finally have two drones connected to my mission planner. But when i press control+F i have a window that shows many buttons I choose swarm from those button I see both the drones and seperate them with some distance. Now i dont know what i have to do next when I press arm(exel leader) a single drone gets armed. Kindly plz help me what i should do next for a successful autonomous flight
In case it helps.
The video again donot show how the swarm flight was possible.
Start the swarm after take off both copters.
I am facing the instability of the child drone in the swarm application using mission plannar. What may be the reason of this ?
Poor tuning is a possibility