Hello All,
I am trying to figure out the whole issue of surface tracking and I am trying to figure out what is the impact of RNGFND_GAIN parameter (which lacks a little more information maybe) on the behavior of the vehicle when equipped with range finder like SF11/C.
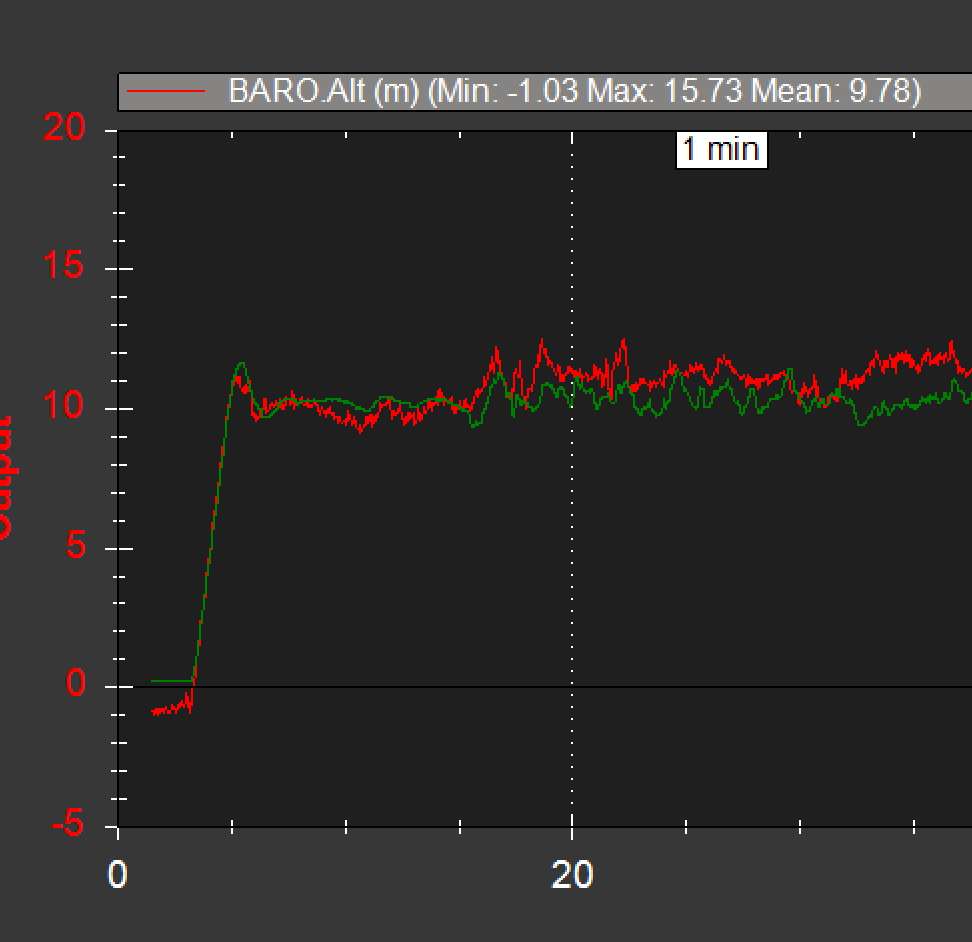
What’s your issue exactly? I use LW20 for terrain following and it works so far without bigger problems. The only thing I notice is a overshooting in altitude at the take off and also in Loiter if I climb manually. I also saw the RNGFND_GAIN, but I didn’t touch it yet.
Hi Michael @buckker ,
I don’t have an issue. I am simply trying to figure what is the effect of this parameter on the “surface tracking” of Ardupilot.
Thank you
Gal
If I understand the surface tracking topic, we can adjust the speed (responsiveness) of correction with RNGFND_GAIN. If flying above rough terrain, we can limit bumps and have a smoother flight.