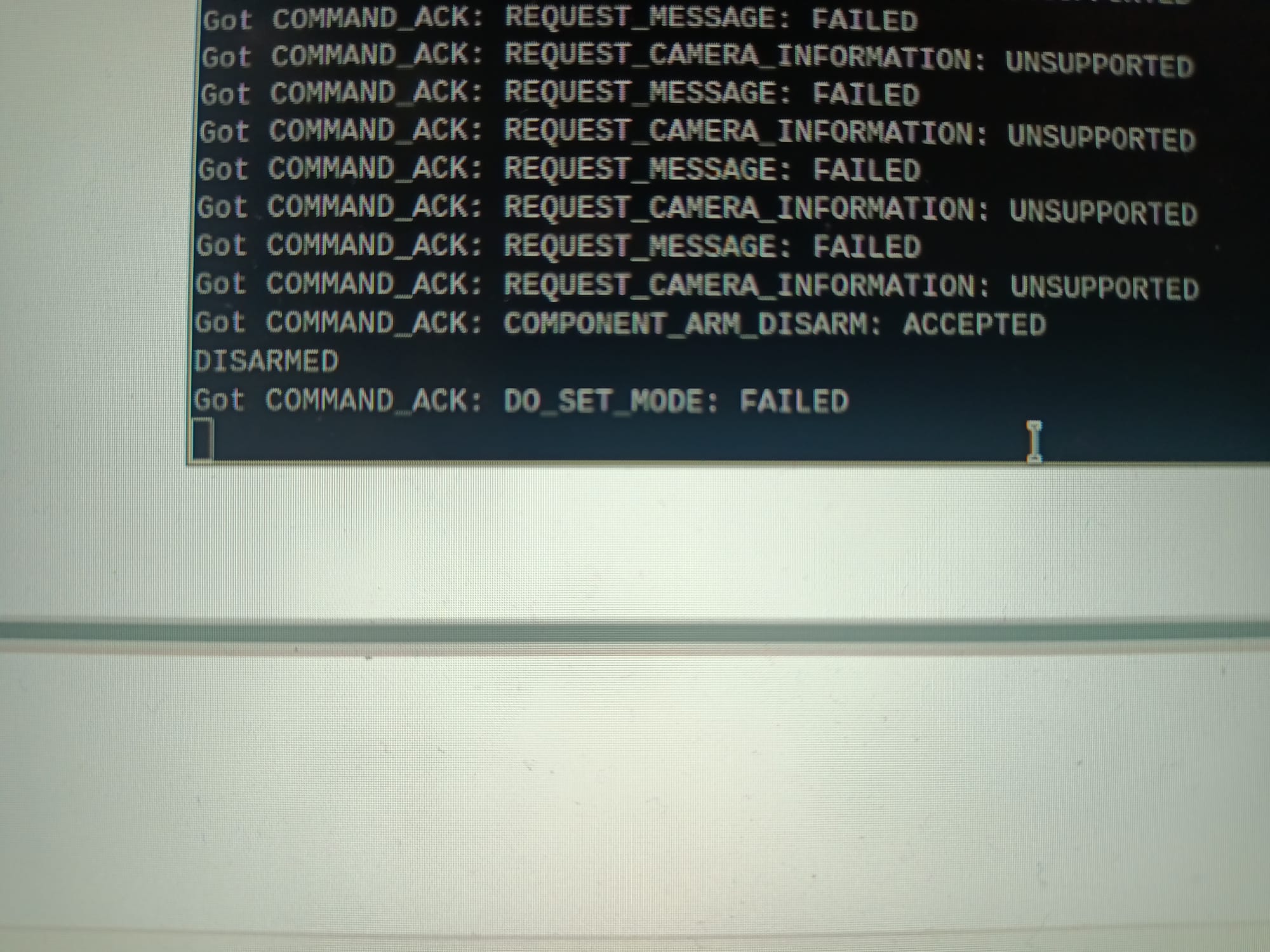
I’m working on a project involving a Raspberry Pi and a Pixhawk controller for an underwater vehicle. Currently, I’m encountering an issue when trying to switch the Pixhawk into GUIDED mode. When I attempt to change modes (either GUIDED or autonomous), I receive the following error message: “MAV_CMD_DO_SET_MODE command failed.” I’ve verified the connection and communication with the Pixhawk, and other commands appear to be functioning correctly. However, the mode switch to GUIDED continues to fail. Could you please provide any guidance on resolving this issue? Thank you very much for your assistance. Best regards.