Are you controlling the direction of the motor gondolas? Can you turn them?
You don’t need to turn them, that’s the whole point.
I know that but I have a scale radio controlled model that uses vectoring thrusters (“schottel”) and I want to use it with Ardupilot Rover.
Ah OK got it. Not an Omni configuration then. Unless something has happened since the following on vectored thrust I don’t think so. Perhaps start a new thread titled “4 vectored thrusters for Arduboat” or similar and see what comes up.
Ha, I just realized that was your post in Git.
1 Like
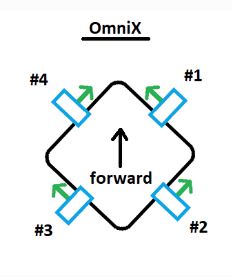
Would the OmniX-Konfiguration work, if the thrusters are placed like this?
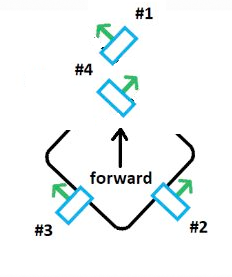
It will probably work but the vehicle’s heading will be a bit unstable. the issue is just that the rotational force from motors 1 and 4 are different to motors 2 and 3. That will lead to the heading becoming a bit unstable when the vehicle is moving around. So for example when the vehicle first starts moving the vehicle’ heading might also change for a moment before it the yaw controller corrects it.
1 Like
Maybe I can try that until vectored thrusters will be implemented maybe someday …
Can you recommend a cheap hardware platform suitable for rover?
We have some reference frames on the wiki here: https://ardupilot.org/rover/docs/reference-frames.html
Others may have other suggestions though.
Erl- Thank you for your work on the Omni code testing. Just curious, what type of boat frame are you using in the videos that you posted? Just curious if it is DIY or purchased as we are looking at building something similar. Thanks again!
Hi
The board is a very old commercial product, that was originally designed to be to tethered or towed with a rope for taking environmental flow measurements. It was damaged and not being used, I patched it up for a rapid development boat. It served its purpose but now have moved onto other custom platforms.
If you are not carrying much weight a boogie board would do the job, if you are after something more pro these are good https://fatyak-kayaks.co.uk/product/hono/ , basically indestructible you can plastic weld them if you need a tunnel or mounting points.
Cheers
Thank you for responding and for the addt’l info, the boogie board option looks promising. For now it looks like we are going to start out with a bait boat platform (~2’ long) and fabricating the necessary waterproof enclosures to hold the electronics and sensors.
If/when we decide to go to a larger platform we’ll definitely consider the boogie board. For anyone else out there looking for options we also considered a dock float such as this: https://www.playstarinc.com/marine-dock-float which has an advertised buoyancy rating of 500 lbs. There appears to be multiple attachment options to that float which is helpful in strapping down gear.
Thank you again!
Hi,
Im searching for info on how to allow an autopilot to control azimuth angle and thrust of the two azimuthing thrusters on my boat to enable automated lateral movement and position holding. Does arduboat have this functionality yet? I am finding this info difficult to locate.
Thanks in advance
/ Axel
Hi @Axel_Rappe,
No, I’m afraid we don’t support aiming motors for lateral movement. Omni Boat support is limited to frames where fixed thrusters provide lateral thrust. Even for these frames though lateral movement is only possible in manual modes. So for example Auto won’t use the lateral motors to stay on the line between waypoints, instead the vehicle will change its heading just like a more regular boat.
2 Likes
Is there any time frame for when omni will be able to be used in auto modes? omni was added 4 years ago and has not been touched since, the Issue for yaw control is still sitting open on github from 2018.
Hello Randy
is there any documentation in regards to keeping (or defining) the heading of an OmniPlus configured platform in Loiter mode?
Thanks